-
1 stabile
1. agg.1) (saldo) устойчивый, прочный2) (fisso) постоянный3) (costante) стабильный, неизменный; без изменений4) (teatr.)2. m.1) (edificio) здание (n.), сооружение (n.), строение (n.), постройка (f.), дом2) (teatro) городской театр -
2 расходомер жидкости (газа)
расходомер жидкости (газа)
расходомер
Ндп. измеритель расхода жидкости (газа)
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа).
[ ГОСТ 15528-86]Расходомеры, служат для измерения объема (объемный расход) или массы (массовый расход) жидкостей, газов и паров, проходящих через заданное сечение трубопровода в единицу времени. Иногда расходомеры снабжают интеграторами, или счетчиками - устройствами для суммирования измеряемых объемов или масс контролируемых сред в течение заданного промежутка времени. Расходомеры разных типов рассчитаны на измерения в определенной области расходов (рис. 1).
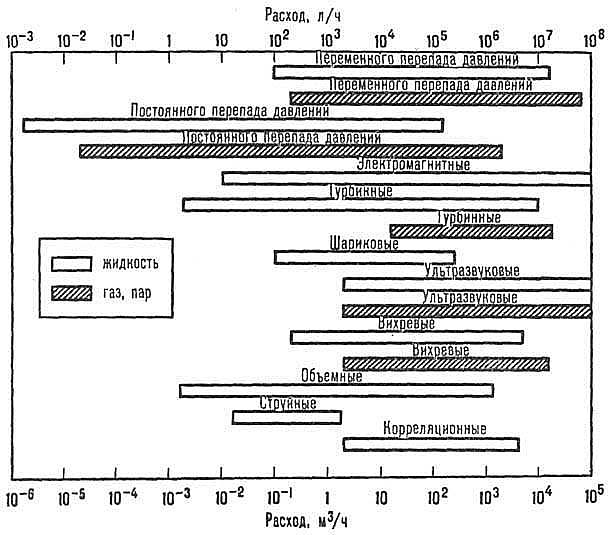
Рис. 1. Диапазоны измерений расходов жидкостей, газов и паров разными расходомерами.
Основные показатели, обусловливающие выбор расходомера: значение расхода; тип контролируемой среды, ее температура, давление, вязкость, плотность, электрическая проводимость, рН; перепад давлений на первичном измерительном преобразователе (датчике); диаметр трубопровода; диапазон (отношение максимального расхода к минимальному) и погрешность измерений. В зависимости от физ.-химических свойств измеряемой и окружающей сред в расходомеры используются различные методы измерений.
В данной статье рассматриваются наиболее важные типы расходомеры и счетчиков, применяемых в химических лабораториях, химических и смежных отраслях промышленности для высокоточных контроля и учета химических веществ при их производстве, выдаче и потреблении, а также в системах автоматизированного управления технологическими процессами.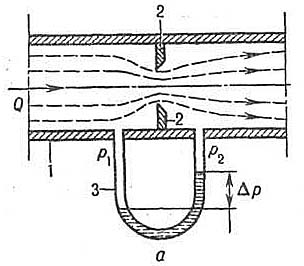
Расходомеры переменного перепада давлений (рис. 2, а). Действие их основано на зависимости перепада давлений на гидравлическом сопротивлении (диафрагмы, сопла и трубы Вентури, сопла Лаваля и др.), расположенном в потоке контролируемой среды, от ее расхода Q. Измерения разности давлений Dp = p1 - p2 осуществляются на прямолинейном участке трубопровода (длиной до 10 и не менее 5 диаметров соответственно до и после гидравлического сопротивления). Расходомеры данного типа особенно распространены благодаря следующим достоинствам: простоте конструкции и возможности измерений в широком диапазоне значений расхода и диаметров трубопроводов (от десятков до 3000 мм и более); возможности применения для различных по составу и агрессивности жидкостей и газов при температурах до 350-400 °С и давлениях до 100 МПа; возможности расчетным путем определять расход без натурной градуировки расходомеры в случае трубопроводов диаметрами 50-1000 мм. Недостатки: небольшой диапазон измерений из-за квадратичной зависимости между расходом и перепадом давлений (3:1); значительные потери давления на гидравлическом сопротивлении и связанные с этим дополнительные затраты энергии. Погрешность 1,5-2,5% от макс. расхода.
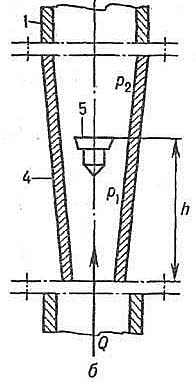
Расходомеры постоянного перепада давлений, или ротаметры ( рис. 2, б). В этих приборах измеряется прямо пропорциональная расходу величина перемещения поплавка h внутри конической трубки под воздействием движущегося снизу вверх потока контролируемой среды. Последний поднимает поплавок до тех пор, пока подъемная сила, возникающая благодаря наличию на нем перепада давлений, не уравновесится весом поплавка. Трубки ротаметров могут быть стеклянными (рассчитаны на давление до 2,5 МПа) и металлическими (до 70 МПа). Поплавки в зависимости от свойств жидкости или газа изготовляют из различных металлов либо пластмасс. Приборы работоспособны при температурах от — 80 до 400 °С, предпочтительны для трубопроводов диаметром до 150 мм, имеют равномерные шкалы, градуированные в единицах объемного расхода. Достоинства: возможность измерений расхода жидкостей и газов от весьма малых значений (0,002 л/ч по воде, 0,03 л/ч по воздуху) до высоких (150-200 и до 3000 м3/ч); широкий диапазон измерений (10:1); малые потери давления (до 0,015 МПа). Погрешность 0,5-2,5% от макс. расхода.
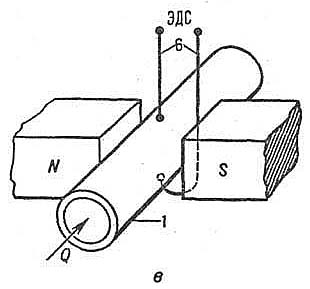
Электромагнитные расходомеры (рис. 2, в). Действие их основано на прямо пропорциональной зависимости расхода от эдс, индуцированной в потоке электропроводной жидкости (минимальная удельная электрическая проводимость 10-3-10-4 См/м), движущейся во внеш. магнитное поле, которое направлено перпендикулярно оси трубопровода. Эдс определяется с помощью двух электродов, вводимых в измеряемую среду диаметрально противоположно через электроизоляционное покрытие внутри поверхности трубопровода. Материалы покрытий - резины, фторопласты, эпоксидные компаунды, керамика и другие. Приборы позволяют измерять расход различных пульп, сиропов, агрессивных и радиоактивных жидкостей и т. д. при давлениях обычно до 2,5 МПа (иногда до 20 МПа); диаметр трубопроводов, как правило, 2-3000 мм. Во избежание поляризации электродов измерения проводят в переменном магнитном поле. Допустимые температуры контролируемой среды определяются термостойкостью электроизоляционных покрытий и могут достигать, как правило, 230 °С. При измерении расхода жидких металлов (например, Na, К и их эвтектик) указанные температуры обусловлены термостойкостью используемых конструкционных материалов, в первую очередь магнитов, создающих постоянное магнитное поле (исключает возникновение в металлах вихревых токов) и составляют 400-500 °С; в данном случае трубопроводы не имеют внутренней изоляции, а. электроды привариваются непосредственно к их наружным поверхностям. Достоинства: высокое быстродействие; широкий диапазон измерений (100:1); отсутствие потерь давления (приборы не имеют элементов, выступающих внутрь трубопровода); показания приборов не зависят от вязкости и плотности жидкостей. Погрешность 0,5-1,0% от измеряемой величины.
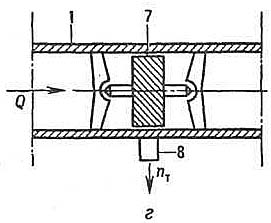
Тахометрические расходомеры В турбинных расходомерах (рис. 2, г) используется зависимость измеряемой тахометром частоты вращения турбинки, приводимой в движение потоком среды (нефтепродукты, растворы кислот и щелочей, нейтральные или агрессивные газы) от ее расхода. Турбинки могут размещаться аксиально либо тангенциально по отношению к направлению движения потока. Диаметр трубопроводов 4-4000 мм; вязкость среды 0,8-750 мм2/с; температура от -240 до 550 °С, давление до 70 МПа; диапазон измерений до 100:1; потери давления 0,05 МПа. Погрешность 0,5-1,5% от макс. расхода.
В шариковых расходомерах контролируемая жидкая среда закручивается с помощью неподвижного винтового направляющего аппарата и увлекает за собой металлический шарик, заставляя его вращаться внутри трубопровода (перемещению вдоль оси препятствуют ограничит. кольца). Мера расхода - частота вращения шарика, измеряемая, например, тахометром. Диаметр трубопроводов 5-150 мм; температура среды от -30 до 250 °С, давление до 6,4 МПа; диапазон измерений 10:1; потери давления до 0,05 МПа. В этих приборах в отличие от турбинных отсутствуют опорные подшипники, что позволяет измерять расход жидкостей с механическими включениями и увеличивает ресурс работы. Погрешность не более 1,5% от максимального расхода.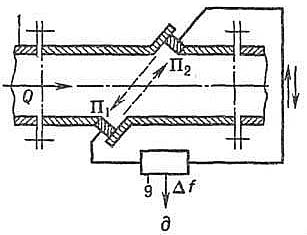
Ультразвуковые расходомеры (рис. 2, д). В основу их работы положено использование разницы во времени прохождения ультразвуковых колебаний (более 20 кГц) в направлении потока контролируемой среды и против него. Электронное устройство формирует электрический импульс, поступающий на пьезоэлемент П1, который излучает электромеханические колебания в движущуюся среду. Эти колебания воспринимаются через некоторое время пьезоэлементом П2, преобразуются им в электрический импульс, попадающий в электронное устройство и снова направляемый им на пьезоэлемент П1 и т.д. Контур П1-П2 характеризуется частотой f1 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной разности между скоростью распространения звука в контролируемой среде и скоростью самой среды. Аналогично электронное устройство подает импульсы в обратном направлении, то есть от пьезоэлемента П2 к пьезоэлементу П1. Контур П2-П1 характеризуется частотой f2 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной сумме скоростей распространения звука в среде и самой среды. Далее электронное устройство определяет разность Df указанных частот, которая пропорциональна скорости (расходу) среды.
Эти приборы не вызывают потерь давления, обладают высоким быстродействием и обеспечивают измерение пульсирующих расходов (частота 5-10 кГц) любых не содержащих газовых включений жидкостей (в т. ч. вязких и агрессивных), а также газов и паров. Диаметр трубопроводов 10-3000 мм и более; температура среды от —40 до 200°С (реже-от —250 до 250 °C), давление до 4 МПа; диапазон измерений 100:1. Погрешность 1,0-2,5% от макс. расхода.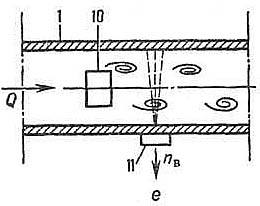
Вихревые расходомеры (рис. 2, е). Действие их основано на зависимости между расходом и частотой возникновения вихрей за твердым телом (например, металлическим прямоугольным стержнем), которое расположено в потоке жидкости или газа. Образованию вихрей способствует поочередное изменение давления па гранях этого тела. Диапазон частот образования вихрей определяется размером и конфигурацией тела и диаметром трубопроводов (25-300 мм). Температура среды обычно от - 50 до 400 °С, реже от -270 до 450 °С; давление до 4 МПа, иногда до -6,3 МПа; диапазон измерений: для жидкостей 12:1, для газов 40:1. Градуировка приборов не зависит от плотности и вязкости контролируемой среды, а также от ее температуры и давления. Погрешность 0,5-1,0% от измеряемой величины при числах Рейнольдса Re > 30000; при Re < 10000 определение расхода практически невозможно из-за отсутствия вихрей.
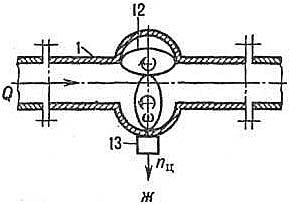
Объемные расходомеры (рис. 2,ж). В качестве измерителей объема служат счетчики с цилиндрическими или овальными шестернями, поршневые, с плавающей шайбой, лопастные, винтовые и другие. Они снабжены устройствами выдачи сигналов, пропорциональных объемному расходу вещества. Эти приборы пропускают определенный объем жидкости за один цикл хода чувствительного элемента. Мера расхода - число таких циклов. Диаметр трубопроводов 15-300 мм; температура среды до 150°С, давление до 10 МПа; диапазон измерений до 20:1. Основное достоинство - стабильность показаний. Недостатки: необходимость установки фильтров, задерживающих твердые частицы (чувствительный элемент при их проникновении может выйти из строя); износ движущихся деталей, приводящий к увеличению погрешности показаний, которая обычно составляет 0,5-1,0 от измеряемой величины.
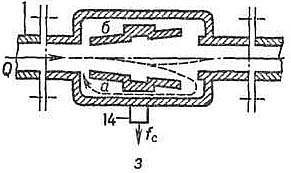
Струйные расходомеры (рис. 2,з). В них используется принцип действия генератора автоколебаний. В приборе часть струи потока жидкости или газа ответвляется и через так называемый канал обратной связи а поступает на вход устройства, создавая поперечное давление на струю. Последняя перебрасывается к противоположной стенке трубопровода, где от нее снова ответвляется часть потока, подаваемая через канал б на вход прибора; в результате струя переходит в первоначальное положение и т. д. Такой переброс происходит с частотой, пропорциональной расходу контролируемой среды, и сопровождается изменением давления в каналах а и б, что позволяет датчику давления воспринимать автоколебания. Диаметр трубопроводов 2-25 мм; температура среды от —263 до 500 °С, давление до 4 МПа; диапазон измерений 10:1. Основное достоинство - отсутствие подвижных элементов. Погрешность-1,5% от макс. расхода.
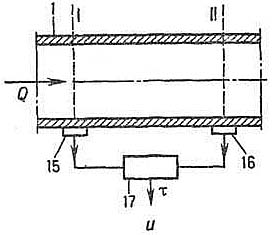
Корреляционные расходомеры (рис. 2, и). В этих приборах с помощью сложных ультразвуковых и иных устройств осуществляется запоминание в заданном сечении трубопровода (I) характерного "образа" потока контролируемой среды и его последнее распознавание в другом сечении (II), расположенном на определенном расстоянии от первого. Мера расхода - время прохождения "образом" потока участка трубопровода между сечениями. Диаметр трубопроводов 15-900 мм; температура среды до 100-150°С, давление до 20 МПа; диапазон измерений 10:1. Достоинства: независимость показаний от изменений плотности, вязкости, электропроводности и других параметров жидкости; отсутствие потерь давления. Погрешность 1 % от измеряемой величины.
[ http://www.chemport.ru/data/chemipedia/article_3233.html]
Недопустимые, нерекомендуемые
Тематики
Синонимы
EN
DE
FR
14. Расходомер жидкости (газа)
Расходомер
Ндп. Измеритель расхода жидкости (газа)
D. Durchflußmeßgerät
E. Flowmeter
F. Débitmètre
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа)
Источник: ГОСТ 15528-86: Средства измерений расхода, объема или массы протекающих жидкости и газа. Термины и определения оригинал документа
Русско-немецкий словарь нормативно-технической терминологии > расходомер жидкости (газа)
-
3 débitmètre
- расходомер жидкости (газа)
- расходомер (в медицине)
- дозиметр мощности поглощенной (эквивалентной) дозы излучения
дозиметр мощности поглощенной (эквивалентной) дозы излучения
-
[ ГОСТ 14337-78]Тематики
- средства измерений ионизир. излучений
EN
FR
- débitmètre
- débitmètre d’équivalent de dose
расходомер
Устройство, которое показывает объемный расход определенного газа или газовой смеси
[ ГОСТ Р 52423-2005]Тематики
- ингаляц. анестезия, искусств. вентиляц. легких
EN
DE
FR
расходомер жидкости (газа)
расходомер
Ндп. измеритель расхода жидкости (газа)
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа).
[ ГОСТ 15528-86]Расходомеры, служат для измерения объема (объемный расход) или массы (массовый расход) жидкостей, газов и паров, проходящих через заданное сечение трубопровода в единицу времени. Иногда расходомеры снабжают интеграторами, или счетчиками - устройствами для суммирования измеряемых объемов или масс контролируемых сред в течение заданного промежутка времени. Расходомеры разных типов рассчитаны на измерения в определенной области расходов (рис. 1).
Рис. 1. Диапазоны измерений расходов жидкостей, газов и паров разными расходомерами.
Основные показатели, обусловливающие выбор расходомера: значение расхода; тип контролируемой среды, ее температура, давление, вязкость, плотность, электрическая проводимость, рН; перепад давлений на первичном измерительном преобразователе (датчике); диаметр трубопровода; диапазон (отношение максимального расхода к минимальному) и погрешность измерений. В зависимости от физ.-химических свойств измеряемой и окружающей сред в расходомеры используются различные методы измерений.
В данной статье рассматриваются наиболее важные типы расходомеры и счетчиков, применяемых в химических лабораториях, химических и смежных отраслях промышленности для высокоточных контроля и учета химических веществ при их производстве, выдаче и потреблении, а также в системах автоматизированного управления технологическими процессами.Расходомеры переменного перепада давлений (рис. 2, а). Действие их основано на зависимости перепада давлений на гидравлическом сопротивлении (диафрагмы, сопла и трубы Вентури, сопла Лаваля и др.), расположенном в потоке контролируемой среды, от ее расхода Q. Измерения разности давлений Dp = p1 - p2 осуществляются на прямолинейном участке трубопровода (длиной до 10 и не менее 5 диаметров соответственно до и после гидравлического сопротивления). Расходомеры данного типа особенно распространены благодаря следующим достоинствам: простоте конструкции и возможности измерений в широком диапазоне значений расхода и диаметров трубопроводов (от десятков до 3000 мм и более); возможности применения для различных по составу и агрессивности жидкостей и газов при температурах до 350-400 °С и давлениях до 100 МПа; возможности расчетным путем определять расход без натурной градуировки расходомеры в случае трубопроводов диаметрами 50-1000 мм. Недостатки: небольшой диапазон измерений из-за квадратичной зависимости между расходом и перепадом давлений (3:1); значительные потери давления на гидравлическом сопротивлении и связанные с этим дополнительные затраты энергии. Погрешность 1,5-2,5% от макс. расхода.
Расходомеры постоянного перепада давлений, или ротаметры ( рис. 2, б). В этих приборах измеряется прямо пропорциональная расходу величина перемещения поплавка h внутри конической трубки под воздействием движущегося снизу вверх потока контролируемой среды. Последний поднимает поплавок до тех пор, пока подъемная сила, возникающая благодаря наличию на нем перепада давлений, не уравновесится весом поплавка. Трубки ротаметров могут быть стеклянными (рассчитаны на давление до 2,5 МПа) и металлическими (до 70 МПа). Поплавки в зависимости от свойств жидкости или газа изготовляют из различных металлов либо пластмасс. Приборы работоспособны при температурах от — 80 до 400 °С, предпочтительны для трубопроводов диаметром до 150 мм, имеют равномерные шкалы, градуированные в единицах объемного расхода. Достоинства: возможность измерений расхода жидкостей и газов от весьма малых значений (0,002 л/ч по воде, 0,03 л/ч по воздуху) до высоких (150-200 и до 3000 м3/ч); широкий диапазон измерений (10:1); малые потери давления (до 0,015 МПа). Погрешность 0,5-2,5% от макс. расхода.
Электромагнитные расходомеры (рис. 2, в). Действие их основано на прямо пропорциональной зависимости расхода от эдс, индуцированной в потоке электропроводной жидкости (минимальная удельная электрическая проводимость 10-3-10-4 См/м), движущейся во внеш. магнитное поле, которое направлено перпендикулярно оси трубопровода. Эдс определяется с помощью двух электродов, вводимых в измеряемую среду диаметрально противоположно через электроизоляционное покрытие внутри поверхности трубопровода. Материалы покрытий - резины, фторопласты, эпоксидные компаунды, керамика и другие. Приборы позволяют измерять расход различных пульп, сиропов, агрессивных и радиоактивных жидкостей и т. д. при давлениях обычно до 2,5 МПа (иногда до 20 МПа); диаметр трубопроводов, как правило, 2-3000 мм. Во избежание поляризации электродов измерения проводят в переменном магнитном поле. Допустимые температуры контролируемой среды определяются термостойкостью электроизоляционных покрытий и могут достигать, как правило, 230 °С. При измерении расхода жидких металлов (например, Na, К и их эвтектик) указанные температуры обусловлены термостойкостью используемых конструкционных материалов, в первую очередь магнитов, создающих постоянное магнитное поле (исключает возникновение в металлах вихревых токов) и составляют 400-500 °С; в данном случае трубопроводы не имеют внутренней изоляции, а. электроды привариваются непосредственно к их наружным поверхностям. Достоинства: высокое быстродействие; широкий диапазон измерений (100:1); отсутствие потерь давления (приборы не имеют элементов, выступающих внутрь трубопровода); показания приборов не зависят от вязкости и плотности жидкостей. Погрешность 0,5-1,0% от измеряемой величины.
Тахометрические расходомеры В турбинных расходомерах (рис. 2, г) используется зависимость измеряемой тахометром частоты вращения турбинки, приводимой в движение потоком среды (нефтепродукты, растворы кислот и щелочей, нейтральные или агрессивные газы) от ее расхода. Турбинки могут размещаться аксиально либо тангенциально по отношению к направлению движения потока. Диаметр трубопроводов 4-4000 мм; вязкость среды 0,8-750 мм2/с; температура от -240 до 550 °С, давление до 70 МПа; диапазон измерений до 100:1; потери давления 0,05 МПа. Погрешность 0,5-1,5% от макс. расхода.
В шариковых расходомерах контролируемая жидкая среда закручивается с помощью неподвижного винтового направляющего аппарата и увлекает за собой металлический шарик, заставляя его вращаться внутри трубопровода (перемещению вдоль оси препятствуют ограничит. кольца). Мера расхода - частота вращения шарика, измеряемая, например, тахометром. Диаметр трубопроводов 5-150 мм; температура среды от -30 до 250 °С, давление до 6,4 МПа; диапазон измерений 10:1; потери давления до 0,05 МПа. В этих приборах в отличие от турбинных отсутствуют опорные подшипники, что позволяет измерять расход жидкостей с механическими включениями и увеличивает ресурс работы. Погрешность не более 1,5% от максимального расхода.Ультразвуковые расходомеры (рис. 2, д). В основу их работы положено использование разницы во времени прохождения ультразвуковых колебаний (более 20 кГц) в направлении потока контролируемой среды и против него. Электронное устройство формирует электрический импульс, поступающий на пьезоэлемент П1, который излучает электромеханические колебания в движущуюся среду. Эти колебания воспринимаются через некоторое время пьезоэлементом П2, преобразуются им в электрический импульс, попадающий в электронное устройство и снова направляемый им на пьезоэлемент П1 и т.д. Контур П1-П2 характеризуется частотой f1 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной разности между скоростью распространения звука в контролируемой среде и скоростью самой среды. Аналогично электронное устройство подает импульсы в обратном направлении, то есть от пьезоэлемента П2 к пьезоэлементу П1. Контур П2-П1 характеризуется частотой f2 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной сумме скоростей распространения звука в среде и самой среды. Далее электронное устройство определяет разность Df указанных частот, которая пропорциональна скорости (расходу) среды.
Эти приборы не вызывают потерь давления, обладают высоким быстродействием и обеспечивают измерение пульсирующих расходов (частота 5-10 кГц) любых не содержащих газовых включений жидкостей (в т. ч. вязких и агрессивных), а также газов и паров. Диаметр трубопроводов 10-3000 мм и более; температура среды от —40 до 200°С (реже-от —250 до 250 °C), давление до 4 МПа; диапазон измерений 100:1. Погрешность 1,0-2,5% от макс. расхода.Вихревые расходомеры (рис. 2, е). Действие их основано на зависимости между расходом и частотой возникновения вихрей за твердым телом (например, металлическим прямоугольным стержнем), которое расположено в потоке жидкости или газа. Образованию вихрей способствует поочередное изменение давления па гранях этого тела. Диапазон частот образования вихрей определяется размером и конфигурацией тела и диаметром трубопроводов (25-300 мм). Температура среды обычно от - 50 до 400 °С, реже от -270 до 450 °С; давление до 4 МПа, иногда до -6,3 МПа; диапазон измерений: для жидкостей 12:1, для газов 40:1. Градуировка приборов не зависит от плотности и вязкости контролируемой среды, а также от ее температуры и давления. Погрешность 0,5-1,0% от измеряемой величины при числах Рейнольдса Re > 30000; при Re < 10000 определение расхода практически невозможно из-за отсутствия вихрей.
Объемные расходомеры (рис. 2,ж). В качестве измерителей объема служат счетчики с цилиндрическими или овальными шестернями, поршневые, с плавающей шайбой, лопастные, винтовые и другие. Они снабжены устройствами выдачи сигналов, пропорциональных объемному расходу вещества. Эти приборы пропускают определенный объем жидкости за один цикл хода чувствительного элемента. Мера расхода - число таких циклов. Диаметр трубопроводов 15-300 мм; температура среды до 150°С, давление до 10 МПа; диапазон измерений до 20:1. Основное достоинство - стабильность показаний. Недостатки: необходимость установки фильтров, задерживающих твердые частицы (чувствительный элемент при их проникновении может выйти из строя); износ движущихся деталей, приводящий к увеличению погрешности показаний, которая обычно составляет 0,5-1,0 от измеряемой величины.
Струйные расходомеры (рис. 2,з). В них используется принцип действия генератора автоколебаний. В приборе часть струи потока жидкости или газа ответвляется и через так называемый канал обратной связи а поступает на вход устройства, создавая поперечное давление на струю. Последняя перебрасывается к противоположной стенке трубопровода, где от нее снова ответвляется часть потока, подаваемая через канал б на вход прибора; в результате струя переходит в первоначальное положение и т. д. Такой переброс происходит с частотой, пропорциональной расходу контролируемой среды, и сопровождается изменением давления в каналах а и б, что позволяет датчику давления воспринимать автоколебания. Диаметр трубопроводов 2-25 мм; температура среды от —263 до 500 °С, давление до 4 МПа; диапазон измерений 10:1. Основное достоинство - отсутствие подвижных элементов. Погрешность-1,5% от макс. расхода.
Корреляционные расходомеры (рис. 2, и). В этих приборах с помощью сложных ультразвуковых и иных устройств осуществляется запоминание в заданном сечении трубопровода (I) характерного "образа" потока контролируемой среды и его последнее распознавание в другом сечении (II), расположенном на определенном расстоянии от первого. Мера расхода - время прохождения "образом" потока участка трубопровода между сечениями. Диаметр трубопроводов 15-900 мм; температура среды до 100-150°С, давление до 20 МПа; диапазон измерений 10:1. Достоинства: независимость показаний от изменений плотности, вязкости, электропроводности и других параметров жидкости; отсутствие потерь давления. Погрешность 1 % от измеряемой величины.
[ http://www.chemport.ru/data/chemipedia/article_3233.html]
Недопустимые, нерекомендуемые
Тематики
Синонимы
EN
DE
FR
14. Расходомер жидкости (газа)
Расходомер
Ндп. Измеритель расхода жидкости (газа)
D. Durchflußmeßgerät
E. Flowmeter
F. Débitmètre
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа)
Источник: ГОСТ 15528-86: Средства измерений расхода, объема или массы протекающих жидкости и газа. Термины и определения оригинал документа
Франко-русский словарь нормативно-технической терминологии > débitmètre
-
4 Durchflußmeßgerät
расходомер
Устройство, которое показывает объемный расход определенного газа или газовой смеси
[ ГОСТ Р 52423-2005]Тематики
- ингаляц. анестезия, искусств. вентиляц. легких
EN
DE
FR
расходомер жидкости (газа)
расходомер
Ндп. измеритель расхода жидкости (газа)
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа).
[ ГОСТ 15528-86]Расходомеры, служат для измерения объема (объемный расход) или массы (массовый расход) жидкостей, газов и паров, проходящих через заданное сечение трубопровода в единицу времени. Иногда расходомеры снабжают интеграторами, или счетчиками - устройствами для суммирования измеряемых объемов или масс контролируемых сред в течение заданного промежутка времени. Расходомеры разных типов рассчитаны на измерения в определенной области расходов (рис. 1).
Рис. 1. Диапазоны измерений расходов жидкостей, газов и паров разными расходомерами.
Основные показатели, обусловливающие выбор расходомера: значение расхода; тип контролируемой среды, ее температура, давление, вязкость, плотность, электрическая проводимость, рН; перепад давлений на первичном измерительном преобразователе (датчике); диаметр трубопровода; диапазон (отношение максимального расхода к минимальному) и погрешность измерений. В зависимости от физ.-химических свойств измеряемой и окружающей сред в расходомеры используются различные методы измерений.
В данной статье рассматриваются наиболее важные типы расходомеры и счетчиков, применяемых в химических лабораториях, химических и смежных отраслях промышленности для высокоточных контроля и учета химических веществ при их производстве, выдаче и потреблении, а также в системах автоматизированного управления технологическими процессами.Расходомеры переменного перепада давлений (рис. 2, а). Действие их основано на зависимости перепада давлений на гидравлическом сопротивлении (диафрагмы, сопла и трубы Вентури, сопла Лаваля и др.), расположенном в потоке контролируемой среды, от ее расхода Q. Измерения разности давлений Dp = p1 - p2 осуществляются на прямолинейном участке трубопровода (длиной до 10 и не менее 5 диаметров соответственно до и после гидравлического сопротивления). Расходомеры данного типа особенно распространены благодаря следующим достоинствам: простоте конструкции и возможности измерений в широком диапазоне значений расхода и диаметров трубопроводов (от десятков до 3000 мм и более); возможности применения для различных по составу и агрессивности жидкостей и газов при температурах до 350-400 °С и давлениях до 100 МПа; возможности расчетным путем определять расход без натурной градуировки расходомеры в случае трубопроводов диаметрами 50-1000 мм. Недостатки: небольшой диапазон измерений из-за квадратичной зависимости между расходом и перепадом давлений (3:1); значительные потери давления на гидравлическом сопротивлении и связанные с этим дополнительные затраты энергии. Погрешность 1,5-2,5% от макс. расхода.
Расходомеры постоянного перепада давлений, или ротаметры ( рис. 2, б). В этих приборах измеряется прямо пропорциональная расходу величина перемещения поплавка h внутри конической трубки под воздействием движущегося снизу вверх потока контролируемой среды. Последний поднимает поплавок до тех пор, пока подъемная сила, возникающая благодаря наличию на нем перепада давлений, не уравновесится весом поплавка. Трубки ротаметров могут быть стеклянными (рассчитаны на давление до 2,5 МПа) и металлическими (до 70 МПа). Поплавки в зависимости от свойств жидкости или газа изготовляют из различных металлов либо пластмасс. Приборы работоспособны при температурах от — 80 до 400 °С, предпочтительны для трубопроводов диаметром до 150 мм, имеют равномерные шкалы, градуированные в единицах объемного расхода. Достоинства: возможность измерений расхода жидкостей и газов от весьма малых значений (0,002 л/ч по воде, 0,03 л/ч по воздуху) до высоких (150-200 и до 3000 м3/ч); широкий диапазон измерений (10:1); малые потери давления (до 0,015 МПа). Погрешность 0,5-2,5% от макс. расхода.
Электромагнитные расходомеры (рис. 2, в). Действие их основано на прямо пропорциональной зависимости расхода от эдс, индуцированной в потоке электропроводной жидкости (минимальная удельная электрическая проводимость 10-3-10-4 См/м), движущейся во внеш. магнитное поле, которое направлено перпендикулярно оси трубопровода. Эдс определяется с помощью двух электродов, вводимых в измеряемую среду диаметрально противоположно через электроизоляционное покрытие внутри поверхности трубопровода. Материалы покрытий - резины, фторопласты, эпоксидные компаунды, керамика и другие. Приборы позволяют измерять расход различных пульп, сиропов, агрессивных и радиоактивных жидкостей и т. д. при давлениях обычно до 2,5 МПа (иногда до 20 МПа); диаметр трубопроводов, как правило, 2-3000 мм. Во избежание поляризации электродов измерения проводят в переменном магнитном поле. Допустимые температуры контролируемой среды определяются термостойкостью электроизоляционных покрытий и могут достигать, как правило, 230 °С. При измерении расхода жидких металлов (например, Na, К и их эвтектик) указанные температуры обусловлены термостойкостью используемых конструкционных материалов, в первую очередь магнитов, создающих постоянное магнитное поле (исключает возникновение в металлах вихревых токов) и составляют 400-500 °С; в данном случае трубопроводы не имеют внутренней изоляции, а. электроды привариваются непосредственно к их наружным поверхностям. Достоинства: высокое быстродействие; широкий диапазон измерений (100:1); отсутствие потерь давления (приборы не имеют элементов, выступающих внутрь трубопровода); показания приборов не зависят от вязкости и плотности жидкостей. Погрешность 0,5-1,0% от измеряемой величины.
Тахометрические расходомеры В турбинных расходомерах (рис. 2, г) используется зависимость измеряемой тахометром частоты вращения турбинки, приводимой в движение потоком среды (нефтепродукты, растворы кислот и щелочей, нейтральные или агрессивные газы) от ее расхода. Турбинки могут размещаться аксиально либо тангенциально по отношению к направлению движения потока. Диаметр трубопроводов 4-4000 мм; вязкость среды 0,8-750 мм2/с; температура от -240 до 550 °С, давление до 70 МПа; диапазон измерений до 100:1; потери давления 0,05 МПа. Погрешность 0,5-1,5% от макс. расхода.
В шариковых расходомерах контролируемая жидкая среда закручивается с помощью неподвижного винтового направляющего аппарата и увлекает за собой металлический шарик, заставляя его вращаться внутри трубопровода (перемещению вдоль оси препятствуют ограничит. кольца). Мера расхода - частота вращения шарика, измеряемая, например, тахометром. Диаметр трубопроводов 5-150 мм; температура среды от -30 до 250 °С, давление до 6,4 МПа; диапазон измерений 10:1; потери давления до 0,05 МПа. В этих приборах в отличие от турбинных отсутствуют опорные подшипники, что позволяет измерять расход жидкостей с механическими включениями и увеличивает ресурс работы. Погрешность не более 1,5% от максимального расхода.Ультразвуковые расходомеры (рис. 2, д). В основу их работы положено использование разницы во времени прохождения ультразвуковых колебаний (более 20 кГц) в направлении потока контролируемой среды и против него. Электронное устройство формирует электрический импульс, поступающий на пьезоэлемент П1, который излучает электромеханические колебания в движущуюся среду. Эти колебания воспринимаются через некоторое время пьезоэлементом П2, преобразуются им в электрический импульс, попадающий в электронное устройство и снова направляемый им на пьезоэлемент П1 и т.д. Контур П1-П2 характеризуется частотой f1 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной разности между скоростью распространения звука в контролируемой среде и скоростью самой среды. Аналогично электронное устройство подает импульсы в обратном направлении, то есть от пьезоэлемента П2 к пьезоэлементу П1. Контур П2-П1 характеризуется частотой f2 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной сумме скоростей распространения звука в среде и самой среды. Далее электронное устройство определяет разность Df указанных частот, которая пропорциональна скорости (расходу) среды.
Эти приборы не вызывают потерь давления, обладают высоким быстродействием и обеспечивают измерение пульсирующих расходов (частота 5-10 кГц) любых не содержащих газовых включений жидкостей (в т. ч. вязких и агрессивных), а также газов и паров. Диаметр трубопроводов 10-3000 мм и более; температура среды от —40 до 200°С (реже-от —250 до 250 °C), давление до 4 МПа; диапазон измерений 100:1. Погрешность 1,0-2,5% от макс. расхода.Вихревые расходомеры (рис. 2, е). Действие их основано на зависимости между расходом и частотой возникновения вихрей за твердым телом (например, металлическим прямоугольным стержнем), которое расположено в потоке жидкости или газа. Образованию вихрей способствует поочередное изменение давления па гранях этого тела. Диапазон частот образования вихрей определяется размером и конфигурацией тела и диаметром трубопроводов (25-300 мм). Температура среды обычно от - 50 до 400 °С, реже от -270 до 450 °С; давление до 4 МПа, иногда до -6,3 МПа; диапазон измерений: для жидкостей 12:1, для газов 40:1. Градуировка приборов не зависит от плотности и вязкости контролируемой среды, а также от ее температуры и давления. Погрешность 0,5-1,0% от измеряемой величины при числах Рейнольдса Re > 30000; при Re < 10000 определение расхода практически невозможно из-за отсутствия вихрей.
Объемные расходомеры (рис. 2,ж). В качестве измерителей объема служат счетчики с цилиндрическими или овальными шестернями, поршневые, с плавающей шайбой, лопастные, винтовые и другие. Они снабжены устройствами выдачи сигналов, пропорциональных объемному расходу вещества. Эти приборы пропускают определенный объем жидкости за один цикл хода чувствительного элемента. Мера расхода - число таких циклов. Диаметр трубопроводов 15-300 мм; температура среды до 150°С, давление до 10 МПа; диапазон измерений до 20:1. Основное достоинство - стабильность показаний. Недостатки: необходимость установки фильтров, задерживающих твердые частицы (чувствительный элемент при их проникновении может выйти из строя); износ движущихся деталей, приводящий к увеличению погрешности показаний, которая обычно составляет 0,5-1,0 от измеряемой величины.
Струйные расходомеры (рис. 2,з). В них используется принцип действия генератора автоколебаний. В приборе часть струи потока жидкости или газа ответвляется и через так называемый канал обратной связи а поступает на вход устройства, создавая поперечное давление на струю. Последняя перебрасывается к противоположной стенке трубопровода, где от нее снова ответвляется часть потока, подаваемая через канал б на вход прибора; в результате струя переходит в первоначальное положение и т. д. Такой переброс происходит с частотой, пропорциональной расходу контролируемой среды, и сопровождается изменением давления в каналах а и б, что позволяет датчику давления воспринимать автоколебания. Диаметр трубопроводов 2-25 мм; температура среды от —263 до 500 °С, давление до 4 МПа; диапазон измерений 10:1. Основное достоинство - отсутствие подвижных элементов. Погрешность-1,5% от макс. расхода.
Корреляционные расходомеры (рис. 2, и). В этих приборах с помощью сложных ультразвуковых и иных устройств осуществляется запоминание в заданном сечении трубопровода (I) характерного "образа" потока контролируемой среды и его последнее распознавание в другом сечении (II), расположенном на определенном расстоянии от первого. Мера расхода - время прохождения "образом" потока участка трубопровода между сечениями. Диаметр трубопроводов 15-900 мм; температура среды до 100-150°С, давление до 20 МПа; диапазон измерений 10:1. Достоинства: независимость показаний от изменений плотности, вязкости, электропроводности и других параметров жидкости; отсутствие потерь давления. Погрешность 1 % от измеряемой величины.
[ http://www.chemport.ru/data/chemipedia/article_3233.html]
Недопустимые, нерекомендуемые
Тематики
Синонимы
EN
DE
FR
14. Расходомер жидкости (газа)
Расходомер
Ндп. Измеритель расхода жидкости (газа)
D. Durchflußmeßgerät
E. Flowmeter
F. Débitmètre
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа)
Источник: ГОСТ 15528-86: Средства измерений расхода, объема или массы протекающих жидкости и газа. Термины и определения оригинал документа
Немецко-русский словарь нормативно-технической терминологии > Durchflußmeßgerät
-
5 расходомер жидкости (газа)
расходомер жидкости (газа)
расходомер
Ндп. измеритель расхода жидкости (газа)
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа).
[ ГОСТ 15528-86]Расходомеры, служат для измерения объема (объемный расход) или массы (массовый расход) жидкостей, газов и паров, проходящих через заданное сечение трубопровода в единицу времени. Иногда расходомеры снабжают интеграторами, или счетчиками - устройствами для суммирования измеряемых объемов или масс контролируемых сред в течение заданного промежутка времени. Расходомеры разных типов рассчитаны на измерения в определенной области расходов (рис. 1).
Рис. 1. Диапазоны измерений расходов жидкостей, газов и паров разными расходомерами.
Основные показатели, обусловливающие выбор расходомера: значение расхода; тип контролируемой среды, ее температура, давление, вязкость, плотность, электрическая проводимость, рН; перепад давлений на первичном измерительном преобразователе (датчике); диаметр трубопровода; диапазон (отношение максимального расхода к минимальному) и погрешность измерений. В зависимости от физ.-химических свойств измеряемой и окружающей сред в расходомеры используются различные методы измерений.
В данной статье рассматриваются наиболее важные типы расходомеры и счетчиков, применяемых в химических лабораториях, химических и смежных отраслях промышленности для высокоточных контроля и учета химических веществ при их производстве, выдаче и потреблении, а также в системах автоматизированного управления технологическими процессами.Расходомеры переменного перепада давлений (рис. 2, а). Действие их основано на зависимости перепада давлений на гидравлическом сопротивлении (диафрагмы, сопла и трубы Вентури, сопла Лаваля и др.), расположенном в потоке контролируемой среды, от ее расхода Q. Измерения разности давлений Dp = p1 - p2 осуществляются на прямолинейном участке трубопровода (длиной до 10 и не менее 5 диаметров соответственно до и после гидравлического сопротивления). Расходомеры данного типа особенно распространены благодаря следующим достоинствам: простоте конструкции и возможности измерений в широком диапазоне значений расхода и диаметров трубопроводов (от десятков до 3000 мм и более); возможности применения для различных по составу и агрессивности жидкостей и газов при температурах до 350-400 °С и давлениях до 100 МПа; возможности расчетным путем определять расход без натурной градуировки расходомеры в случае трубопроводов диаметрами 50-1000 мм. Недостатки: небольшой диапазон измерений из-за квадратичной зависимости между расходом и перепадом давлений (3:1); значительные потери давления на гидравлическом сопротивлении и связанные с этим дополнительные затраты энергии. Погрешность 1,5-2,5% от макс. расхода.
Расходомеры постоянного перепада давлений, или ротаметры ( рис. 2, б). В этих приборах измеряется прямо пропорциональная расходу величина перемещения поплавка h внутри конической трубки под воздействием движущегося снизу вверх потока контролируемой среды. Последний поднимает поплавок до тех пор, пока подъемная сила, возникающая благодаря наличию на нем перепада давлений, не уравновесится весом поплавка. Трубки ротаметров могут быть стеклянными (рассчитаны на давление до 2,5 МПа) и металлическими (до 70 МПа). Поплавки в зависимости от свойств жидкости или газа изготовляют из различных металлов либо пластмасс. Приборы работоспособны при температурах от — 80 до 400 °С, предпочтительны для трубопроводов диаметром до 150 мм, имеют равномерные шкалы, градуированные в единицах объемного расхода. Достоинства: возможность измерений расхода жидкостей и газов от весьма малых значений (0,002 л/ч по воде, 0,03 л/ч по воздуху) до высоких (150-200 и до 3000 м3/ч); широкий диапазон измерений (10:1); малые потери давления (до 0,015 МПа). Погрешность 0,5-2,5% от макс. расхода.
Электромагнитные расходомеры (рис. 2, в). Действие их основано на прямо пропорциональной зависимости расхода от эдс, индуцированной в потоке электропроводной жидкости (минимальная удельная электрическая проводимость 10-3-10-4 См/м), движущейся во внеш. магнитное поле, которое направлено перпендикулярно оси трубопровода. Эдс определяется с помощью двух электродов, вводимых в измеряемую среду диаметрально противоположно через электроизоляционное покрытие внутри поверхности трубопровода. Материалы покрытий - резины, фторопласты, эпоксидные компаунды, керамика и другие. Приборы позволяют измерять расход различных пульп, сиропов, агрессивных и радиоактивных жидкостей и т. д. при давлениях обычно до 2,5 МПа (иногда до 20 МПа); диаметр трубопроводов, как правило, 2-3000 мм. Во избежание поляризации электродов измерения проводят в переменном магнитном поле. Допустимые температуры контролируемой среды определяются термостойкостью электроизоляционных покрытий и могут достигать, как правило, 230 °С. При измерении расхода жидких металлов (например, Na, К и их эвтектик) указанные температуры обусловлены термостойкостью используемых конструкционных материалов, в первую очередь магнитов, создающих постоянное магнитное поле (исключает возникновение в металлах вихревых токов) и составляют 400-500 °С; в данном случае трубопроводы не имеют внутренней изоляции, а. электроды привариваются непосредственно к их наружным поверхностям. Достоинства: высокое быстродействие; широкий диапазон измерений (100:1); отсутствие потерь давления (приборы не имеют элементов, выступающих внутрь трубопровода); показания приборов не зависят от вязкости и плотности жидкостей. Погрешность 0,5-1,0% от измеряемой величины.
Тахометрические расходомеры В турбинных расходомерах (рис. 2, г) используется зависимость измеряемой тахометром частоты вращения турбинки, приводимой в движение потоком среды (нефтепродукты, растворы кислот и щелочей, нейтральные или агрессивные газы) от ее расхода. Турбинки могут размещаться аксиально либо тангенциально по отношению к направлению движения потока. Диаметр трубопроводов 4-4000 мм; вязкость среды 0,8-750 мм2/с; температура от -240 до 550 °С, давление до 70 МПа; диапазон измерений до 100:1; потери давления 0,05 МПа. Погрешность 0,5-1,5% от макс. расхода.
В шариковых расходомерах контролируемая жидкая среда закручивается с помощью неподвижного винтового направляющего аппарата и увлекает за собой металлический шарик, заставляя его вращаться внутри трубопровода (перемещению вдоль оси препятствуют ограничит. кольца). Мера расхода - частота вращения шарика, измеряемая, например, тахометром. Диаметр трубопроводов 5-150 мм; температура среды от -30 до 250 °С, давление до 6,4 МПа; диапазон измерений 10:1; потери давления до 0,05 МПа. В этих приборах в отличие от турбинных отсутствуют опорные подшипники, что позволяет измерять расход жидкостей с механическими включениями и увеличивает ресурс работы. Погрешность не более 1,5% от максимального расхода.Ультразвуковые расходомеры (рис. 2, д). В основу их работы положено использование разницы во времени прохождения ультразвуковых колебаний (более 20 кГц) в направлении потока контролируемой среды и против него. Электронное устройство формирует электрический импульс, поступающий на пьезоэлемент П1, который излучает электромеханические колебания в движущуюся среду. Эти колебания воспринимаются через некоторое время пьезоэлементом П2, преобразуются им в электрический импульс, попадающий в электронное устройство и снова направляемый им на пьезоэлемент П1 и т.д. Контур П1-П2 характеризуется частотой f1 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной разности между скоростью распространения звука в контролируемой среде и скоростью самой среды. Аналогично электронное устройство подает импульсы в обратном направлении, то есть от пьезоэлемента П2 к пьезоэлементу П1. Контур П2-П1 характеризуется частотой f2 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной сумме скоростей распространения звука в среде и самой среды. Далее электронное устройство определяет разность Df указанных частот, которая пропорциональна скорости (расходу) среды.
Эти приборы не вызывают потерь давления, обладают высоким быстродействием и обеспечивают измерение пульсирующих расходов (частота 5-10 кГц) любых не содержащих газовых включений жидкостей (в т. ч. вязких и агрессивных), а также газов и паров. Диаметр трубопроводов 10-3000 мм и более; температура среды от —40 до 200°С (реже-от —250 до 250 °C), давление до 4 МПа; диапазон измерений 100:1. Погрешность 1,0-2,5% от макс. расхода.Вихревые расходомеры (рис. 2, е). Действие их основано на зависимости между расходом и частотой возникновения вихрей за твердым телом (например, металлическим прямоугольным стержнем), которое расположено в потоке жидкости или газа. Образованию вихрей способствует поочередное изменение давления па гранях этого тела. Диапазон частот образования вихрей определяется размером и конфигурацией тела и диаметром трубопроводов (25-300 мм). Температура среды обычно от - 50 до 400 °С, реже от -270 до 450 °С; давление до 4 МПа, иногда до -6,3 МПа; диапазон измерений: для жидкостей 12:1, для газов 40:1. Градуировка приборов не зависит от плотности и вязкости контролируемой среды, а также от ее температуры и давления. Погрешность 0,5-1,0% от измеряемой величины при числах Рейнольдса Re > 30000; при Re < 10000 определение расхода практически невозможно из-за отсутствия вихрей.
Объемные расходомеры (рис. 2,ж). В качестве измерителей объема служат счетчики с цилиндрическими или овальными шестернями, поршневые, с плавающей шайбой, лопастные, винтовые и другие. Они снабжены устройствами выдачи сигналов, пропорциональных объемному расходу вещества. Эти приборы пропускают определенный объем жидкости за один цикл хода чувствительного элемента. Мера расхода - число таких циклов. Диаметр трубопроводов 15-300 мм; температура среды до 150°С, давление до 10 МПа; диапазон измерений до 20:1. Основное достоинство - стабильность показаний. Недостатки: необходимость установки фильтров, задерживающих твердые частицы (чувствительный элемент при их проникновении может выйти из строя); износ движущихся деталей, приводящий к увеличению погрешности показаний, которая обычно составляет 0,5-1,0 от измеряемой величины.
Струйные расходомеры (рис. 2,з). В них используется принцип действия генератора автоколебаний. В приборе часть струи потока жидкости или газа ответвляется и через так называемый канал обратной связи а поступает на вход устройства, создавая поперечное давление на струю. Последняя перебрасывается к противоположной стенке трубопровода, где от нее снова ответвляется часть потока, подаваемая через канал б на вход прибора; в результате струя переходит в первоначальное положение и т. д. Такой переброс происходит с частотой, пропорциональной расходу контролируемой среды, и сопровождается изменением давления в каналах а и б, что позволяет датчику давления воспринимать автоколебания. Диаметр трубопроводов 2-25 мм; температура среды от —263 до 500 °С, давление до 4 МПа; диапазон измерений 10:1. Основное достоинство - отсутствие подвижных элементов. Погрешность-1,5% от макс. расхода.
Корреляционные расходомеры (рис. 2, и). В этих приборах с помощью сложных ультразвуковых и иных устройств осуществляется запоминание в заданном сечении трубопровода (I) характерного "образа" потока контролируемой среды и его последнее распознавание в другом сечении (II), расположенном на определенном расстоянии от первого. Мера расхода - время прохождения "образом" потока участка трубопровода между сечениями. Диаметр трубопроводов 15-900 мм; температура среды до 100-150°С, давление до 20 МПа; диапазон измерений 10:1. Достоинства: независимость показаний от изменений плотности, вязкости, электропроводности и других параметров жидкости; отсутствие потерь давления. Погрешность 1 % от измеряемой величины.
[ http://www.chemport.ru/data/chemipedia/article_3233.html]
Недопустимые, нерекомендуемые
Тематики
Синонимы
EN
DE
FR
14. Расходомер жидкости (газа)
Расходомер
Ндп. Измеритель расхода жидкости (газа)
D. Durchflußmeßgerät
E. Flowmeter
F. Débitmètre
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа)
Источник: ГОСТ 15528-86: Средства измерений расхода, объема или массы протекающих жидкости и газа. Термины и определения оригинал документа
Русско-английский словарь нормативно-технической терминологии > расходомер жидкости (газа)
-
6 расходомер жидкости (газа)
расходомер жидкости (газа)
расходомер
Ндп. измеритель расхода жидкости (газа)
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа).
[ ГОСТ 15528-86]Расходомеры, служат для измерения объема (объемный расход) или массы (массовый расход) жидкостей, газов и паров, проходящих через заданное сечение трубопровода в единицу времени. Иногда расходомеры снабжают интеграторами, или счетчиками - устройствами для суммирования измеряемых объемов или масс контролируемых сред в течение заданного промежутка времени. Расходомеры разных типов рассчитаны на измерения в определенной области расходов (рис. 1).
Рис. 1. Диапазоны измерений расходов жидкостей, газов и паров разными расходомерами.
Основные показатели, обусловливающие выбор расходомера: значение расхода; тип контролируемой среды, ее температура, давление, вязкость, плотность, электрическая проводимость, рН; перепад давлений на первичном измерительном преобразователе (датчике); диаметр трубопровода; диапазон (отношение максимального расхода к минимальному) и погрешность измерений. В зависимости от физ.-химических свойств измеряемой и окружающей сред в расходомеры используются различные методы измерений.
В данной статье рассматриваются наиболее важные типы расходомеры и счетчиков, применяемых в химических лабораториях, химических и смежных отраслях промышленности для высокоточных контроля и учета химических веществ при их производстве, выдаче и потреблении, а также в системах автоматизированного управления технологическими процессами.Расходомеры переменного перепада давлений (рис. 2, а). Действие их основано на зависимости перепада давлений на гидравлическом сопротивлении (диафрагмы, сопла и трубы Вентури, сопла Лаваля и др.), расположенном в потоке контролируемой среды, от ее расхода Q. Измерения разности давлений Dp = p1 - p2 осуществляются на прямолинейном участке трубопровода (длиной до 10 и не менее 5 диаметров соответственно до и после гидравлического сопротивления). Расходомеры данного типа особенно распространены благодаря следующим достоинствам: простоте конструкции и возможности измерений в широком диапазоне значений расхода и диаметров трубопроводов (от десятков до 3000 мм и более); возможности применения для различных по составу и агрессивности жидкостей и газов при температурах до 350-400 °С и давлениях до 100 МПа; возможности расчетным путем определять расход без натурной градуировки расходомеры в случае трубопроводов диаметрами 50-1000 мм. Недостатки: небольшой диапазон измерений из-за квадратичной зависимости между расходом и перепадом давлений (3:1); значительные потери давления на гидравлическом сопротивлении и связанные с этим дополнительные затраты энергии. Погрешность 1,5-2,5% от макс. расхода.
Расходомеры постоянного перепада давлений, или ротаметры ( рис. 2, б). В этих приборах измеряется прямо пропорциональная расходу величина перемещения поплавка h внутри конической трубки под воздействием движущегося снизу вверх потока контролируемой среды. Последний поднимает поплавок до тех пор, пока подъемная сила, возникающая благодаря наличию на нем перепада давлений, не уравновесится весом поплавка. Трубки ротаметров могут быть стеклянными (рассчитаны на давление до 2,5 МПа) и металлическими (до 70 МПа). Поплавки в зависимости от свойств жидкости или газа изготовляют из различных металлов либо пластмасс. Приборы работоспособны при температурах от — 80 до 400 °С, предпочтительны для трубопроводов диаметром до 150 мм, имеют равномерные шкалы, градуированные в единицах объемного расхода. Достоинства: возможность измерений расхода жидкостей и газов от весьма малых значений (0,002 л/ч по воде, 0,03 л/ч по воздуху) до высоких (150-200 и до 3000 м3/ч); широкий диапазон измерений (10:1); малые потери давления (до 0,015 МПа). Погрешность 0,5-2,5% от макс. расхода.
Электромагнитные расходомеры (рис. 2, в). Действие их основано на прямо пропорциональной зависимости расхода от эдс, индуцированной в потоке электропроводной жидкости (минимальная удельная электрическая проводимость 10-3-10-4 См/м), движущейся во внеш. магнитное поле, которое направлено перпендикулярно оси трубопровода. Эдс определяется с помощью двух электродов, вводимых в измеряемую среду диаметрально противоположно через электроизоляционное покрытие внутри поверхности трубопровода. Материалы покрытий - резины, фторопласты, эпоксидные компаунды, керамика и другие. Приборы позволяют измерять расход различных пульп, сиропов, агрессивных и радиоактивных жидкостей и т. д. при давлениях обычно до 2,5 МПа (иногда до 20 МПа); диаметр трубопроводов, как правило, 2-3000 мм. Во избежание поляризации электродов измерения проводят в переменном магнитном поле. Допустимые температуры контролируемой среды определяются термостойкостью электроизоляционных покрытий и могут достигать, как правило, 230 °С. При измерении расхода жидких металлов (например, Na, К и их эвтектик) указанные температуры обусловлены термостойкостью используемых конструкционных материалов, в первую очередь магнитов, создающих постоянное магнитное поле (исключает возникновение в металлах вихревых токов) и составляют 400-500 °С; в данном случае трубопроводы не имеют внутренней изоляции, а. электроды привариваются непосредственно к их наружным поверхностям. Достоинства: высокое быстродействие; широкий диапазон измерений (100:1); отсутствие потерь давления (приборы не имеют элементов, выступающих внутрь трубопровода); показания приборов не зависят от вязкости и плотности жидкостей. Погрешность 0,5-1,0% от измеряемой величины.
Тахометрические расходомеры В турбинных расходомерах (рис. 2, г) используется зависимость измеряемой тахометром частоты вращения турбинки, приводимой в движение потоком среды (нефтепродукты, растворы кислот и щелочей, нейтральные или агрессивные газы) от ее расхода. Турбинки могут размещаться аксиально либо тангенциально по отношению к направлению движения потока. Диаметр трубопроводов 4-4000 мм; вязкость среды 0,8-750 мм2/с; температура от -240 до 550 °С, давление до 70 МПа; диапазон измерений до 100:1; потери давления 0,05 МПа. Погрешность 0,5-1,5% от макс. расхода.
В шариковых расходомерах контролируемая жидкая среда закручивается с помощью неподвижного винтового направляющего аппарата и увлекает за собой металлический шарик, заставляя его вращаться внутри трубопровода (перемещению вдоль оси препятствуют ограничит. кольца). Мера расхода - частота вращения шарика, измеряемая, например, тахометром. Диаметр трубопроводов 5-150 мм; температура среды от -30 до 250 °С, давление до 6,4 МПа; диапазон измерений 10:1; потери давления до 0,05 МПа. В этих приборах в отличие от турбинных отсутствуют опорные подшипники, что позволяет измерять расход жидкостей с механическими включениями и увеличивает ресурс работы. Погрешность не более 1,5% от максимального расхода.Ультразвуковые расходомеры (рис. 2, д). В основу их работы положено использование разницы во времени прохождения ультразвуковых колебаний (более 20 кГц) в направлении потока контролируемой среды и против него. Электронное устройство формирует электрический импульс, поступающий на пьезоэлемент П1, который излучает электромеханические колебания в движущуюся среду. Эти колебания воспринимаются через некоторое время пьезоэлементом П2, преобразуются им в электрический импульс, попадающий в электронное устройство и снова направляемый им на пьезоэлемент П1 и т.д. Контур П1-П2 характеризуется частотой f1 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной разности между скоростью распространения звука в контролируемой среде и скоростью самой среды. Аналогично электронное устройство подает импульсы в обратном направлении, то есть от пьезоэлемента П2 к пьезоэлементу П1. Контур П2-П1 характеризуется частотой f2 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной сумме скоростей распространения звука в среде и самой среды. Далее электронное устройство определяет разность Df указанных частот, которая пропорциональна скорости (расходу) среды.
Эти приборы не вызывают потерь давления, обладают высоким быстродействием и обеспечивают измерение пульсирующих расходов (частота 5-10 кГц) любых не содержащих газовых включений жидкостей (в т. ч. вязких и агрессивных), а также газов и паров. Диаметр трубопроводов 10-3000 мм и более; температура среды от —40 до 200°С (реже-от —250 до 250 °C), давление до 4 МПа; диапазон измерений 100:1. Погрешность 1,0-2,5% от макс. расхода.Вихревые расходомеры (рис. 2, е). Действие их основано на зависимости между расходом и частотой возникновения вихрей за твердым телом (например, металлическим прямоугольным стержнем), которое расположено в потоке жидкости или газа. Образованию вихрей способствует поочередное изменение давления па гранях этого тела. Диапазон частот образования вихрей определяется размером и конфигурацией тела и диаметром трубопроводов (25-300 мм). Температура среды обычно от - 50 до 400 °С, реже от -270 до 450 °С; давление до 4 МПа, иногда до -6,3 МПа; диапазон измерений: для жидкостей 12:1, для газов 40:1. Градуировка приборов не зависит от плотности и вязкости контролируемой среды, а также от ее температуры и давления. Погрешность 0,5-1,0% от измеряемой величины при числах Рейнольдса Re > 30000; при Re < 10000 определение расхода практически невозможно из-за отсутствия вихрей.
Объемные расходомеры (рис. 2,ж). В качестве измерителей объема служат счетчики с цилиндрическими или овальными шестернями, поршневые, с плавающей шайбой, лопастные, винтовые и другие. Они снабжены устройствами выдачи сигналов, пропорциональных объемному расходу вещества. Эти приборы пропускают определенный объем жидкости за один цикл хода чувствительного элемента. Мера расхода - число таких циклов. Диаметр трубопроводов 15-300 мм; температура среды до 150°С, давление до 10 МПа; диапазон измерений до 20:1. Основное достоинство - стабильность показаний. Недостатки: необходимость установки фильтров, задерживающих твердые частицы (чувствительный элемент при их проникновении может выйти из строя); износ движущихся деталей, приводящий к увеличению погрешности показаний, которая обычно составляет 0,5-1,0 от измеряемой величины.
Струйные расходомеры (рис. 2,з). В них используется принцип действия генератора автоколебаний. В приборе часть струи потока жидкости или газа ответвляется и через так называемый канал обратной связи а поступает на вход устройства, создавая поперечное давление на струю. Последняя перебрасывается к противоположной стенке трубопровода, где от нее снова ответвляется часть потока, подаваемая через канал б на вход прибора; в результате струя переходит в первоначальное положение и т. д. Такой переброс происходит с частотой, пропорциональной расходу контролируемой среды, и сопровождается изменением давления в каналах а и б, что позволяет датчику давления воспринимать автоколебания. Диаметр трубопроводов 2-25 мм; температура среды от —263 до 500 °С, давление до 4 МПа; диапазон измерений 10:1. Основное достоинство - отсутствие подвижных элементов. Погрешность-1,5% от макс. расхода.
Корреляционные расходомеры (рис. 2, и). В этих приборах с помощью сложных ультразвуковых и иных устройств осуществляется запоминание в заданном сечении трубопровода (I) характерного "образа" потока контролируемой среды и его последнее распознавание в другом сечении (II), расположенном на определенном расстоянии от первого. Мера расхода - время прохождения "образом" потока участка трубопровода между сечениями. Диаметр трубопроводов 15-900 мм; температура среды до 100-150°С, давление до 20 МПа; диапазон измерений 10:1. Достоинства: независимость показаний от изменений плотности, вязкости, электропроводности и других параметров жидкости; отсутствие потерь давления. Погрешность 1 % от измеряемой величины.
[ http://www.chemport.ru/data/chemipedia/article_3233.html]
Недопустимые, нерекомендуемые
Тематики
Синонимы
EN
DE
FR
14. Расходомер жидкости (газа)
Расходомер
Ндп. Измеритель расхода жидкости (газа)
D. Durchflußmeßgerät
E. Flowmeter
F. Débitmètre
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа)
Источник: ГОСТ 15528-86: Средства измерений расхода, объема или массы протекающих жидкости и газа. Термины и определения оригинал документа
Русско-французский словарь нормативно-технической терминологии > расходомер жидкости (газа)
-
7 flowmeter
гидрологический расходомер
Гидротехническое сооружение для измерения расходов воды в открытых водных потоках по устойчивой однозначной зависимости расхода воды от напора над сооружением.
[ ГОСТ 19179-73]Тематики
Обобщающие термины
EN
расходомер
Прибор для измерения расхода газов, жидкостей и сыпучих материалов
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]Тематики
EN
DE
FR
расходомер
Устройство, которое показывает объемный расход определенного газа или газовой смеси
[ ГОСТ Р 52423-2005]Тематики
- ингаляц. анестезия, искусств. вентиляц. легких
EN
DE
FR
расходомер жидкости (газа)
расходомер
Ндп. измеритель расхода жидкости (газа)
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа).
[ ГОСТ 15528-86]Расходомеры, служат для измерения объема (объемный расход) или массы (массовый расход) жидкостей, газов и паров, проходящих через заданное сечение трубопровода в единицу времени. Иногда расходомеры снабжают интеграторами, или счетчиками - устройствами для суммирования измеряемых объемов или масс контролируемых сред в течение заданного промежутка времени. Расходомеры разных типов рассчитаны на измерения в определенной области расходов (рис. 1).
Рис. 1. Диапазоны измерений расходов жидкостей, газов и паров разными расходомерами.
Основные показатели, обусловливающие выбор расходомера: значение расхода; тип контролируемой среды, ее температура, давление, вязкость, плотность, электрическая проводимость, рН; перепад давлений на первичном измерительном преобразователе (датчике); диаметр трубопровода; диапазон (отношение максимального расхода к минимальному) и погрешность измерений. В зависимости от физ.-химических свойств измеряемой и окружающей сред в расходомеры используются различные методы измерений.
В данной статье рассматриваются наиболее важные типы расходомеры и счетчиков, применяемых в химических лабораториях, химических и смежных отраслях промышленности для высокоточных контроля и учета химических веществ при их производстве, выдаче и потреблении, а также в системах автоматизированного управления технологическими процессами.Расходомеры переменного перепада давлений (рис. 2, а). Действие их основано на зависимости перепада давлений на гидравлическом сопротивлении (диафрагмы, сопла и трубы Вентури, сопла Лаваля и др.), расположенном в потоке контролируемой среды, от ее расхода Q. Измерения разности давлений Dp = p1 - p2 осуществляются на прямолинейном участке трубопровода (длиной до 10 и не менее 5 диаметров соответственно до и после гидравлического сопротивления). Расходомеры данного типа особенно распространены благодаря следующим достоинствам: простоте конструкции и возможности измерений в широком диапазоне значений расхода и диаметров трубопроводов (от десятков до 3000 мм и более); возможности применения для различных по составу и агрессивности жидкостей и газов при температурах до 350-400 °С и давлениях до 100 МПа; возможности расчетным путем определять расход без натурной градуировки расходомеры в случае трубопроводов диаметрами 50-1000 мм. Недостатки: небольшой диапазон измерений из-за квадратичной зависимости между расходом и перепадом давлений (3:1); значительные потери давления на гидравлическом сопротивлении и связанные с этим дополнительные затраты энергии. Погрешность 1,5-2,5% от макс. расхода.
Расходомеры постоянного перепада давлений, или ротаметры ( рис. 2, б). В этих приборах измеряется прямо пропорциональная расходу величина перемещения поплавка h внутри конической трубки под воздействием движущегося снизу вверх потока контролируемой среды. Последний поднимает поплавок до тех пор, пока подъемная сила, возникающая благодаря наличию на нем перепада давлений, не уравновесится весом поплавка. Трубки ротаметров могут быть стеклянными (рассчитаны на давление до 2,5 МПа) и металлическими (до 70 МПа). Поплавки в зависимости от свойств жидкости или газа изготовляют из различных металлов либо пластмасс. Приборы работоспособны при температурах от — 80 до 400 °С, предпочтительны для трубопроводов диаметром до 150 мм, имеют равномерные шкалы, градуированные в единицах объемного расхода. Достоинства: возможность измерений расхода жидкостей и газов от весьма малых значений (0,002 л/ч по воде, 0,03 л/ч по воздуху) до высоких (150-200 и до 3000 м3/ч); широкий диапазон измерений (10:1); малые потери давления (до 0,015 МПа). Погрешность 0,5-2,5% от макс. расхода.
Электромагнитные расходомеры (рис. 2, в). Действие их основано на прямо пропорциональной зависимости расхода от эдс, индуцированной в потоке электропроводной жидкости (минимальная удельная электрическая проводимость 10-3-10-4 См/м), движущейся во внеш. магнитное поле, которое направлено перпендикулярно оси трубопровода. Эдс определяется с помощью двух электродов, вводимых в измеряемую среду диаметрально противоположно через электроизоляционное покрытие внутри поверхности трубопровода. Материалы покрытий - резины, фторопласты, эпоксидные компаунды, керамика и другие. Приборы позволяют измерять расход различных пульп, сиропов, агрессивных и радиоактивных жидкостей и т. д. при давлениях обычно до 2,5 МПа (иногда до 20 МПа); диаметр трубопроводов, как правило, 2-3000 мм. Во избежание поляризации электродов измерения проводят в переменном магнитном поле. Допустимые температуры контролируемой среды определяются термостойкостью электроизоляционных покрытий и могут достигать, как правило, 230 °С. При измерении расхода жидких металлов (например, Na, К и их эвтектик) указанные температуры обусловлены термостойкостью используемых конструкционных материалов, в первую очередь магнитов, создающих постоянное магнитное поле (исключает возникновение в металлах вихревых токов) и составляют 400-500 °С; в данном случае трубопроводы не имеют внутренней изоляции, а. электроды привариваются непосредственно к их наружным поверхностям. Достоинства: высокое быстродействие; широкий диапазон измерений (100:1); отсутствие потерь давления (приборы не имеют элементов, выступающих внутрь трубопровода); показания приборов не зависят от вязкости и плотности жидкостей. Погрешность 0,5-1,0% от измеряемой величины.
Тахометрические расходомеры В турбинных расходомерах (рис. 2, г) используется зависимость измеряемой тахометром частоты вращения турбинки, приводимой в движение потоком среды (нефтепродукты, растворы кислот и щелочей, нейтральные или агрессивные газы) от ее расхода. Турбинки могут размещаться аксиально либо тангенциально по отношению к направлению движения потока. Диаметр трубопроводов 4-4000 мм; вязкость среды 0,8-750 мм2/с; температура от -240 до 550 °С, давление до 70 МПа; диапазон измерений до 100:1; потери давления 0,05 МПа. Погрешность 0,5-1,5% от макс. расхода.
В шариковых расходомерах контролируемая жидкая среда закручивается с помощью неподвижного винтового направляющего аппарата и увлекает за собой металлический шарик, заставляя его вращаться внутри трубопровода (перемещению вдоль оси препятствуют ограничит. кольца). Мера расхода - частота вращения шарика, измеряемая, например, тахометром. Диаметр трубопроводов 5-150 мм; температура среды от -30 до 250 °С, давление до 6,4 МПа; диапазон измерений 10:1; потери давления до 0,05 МПа. В этих приборах в отличие от турбинных отсутствуют опорные подшипники, что позволяет измерять расход жидкостей с механическими включениями и увеличивает ресурс работы. Погрешность не более 1,5% от максимального расхода.Ультразвуковые расходомеры (рис. 2, д). В основу их работы положено использование разницы во времени прохождения ультразвуковых колебаний (более 20 кГц) в направлении потока контролируемой среды и против него. Электронное устройство формирует электрический импульс, поступающий на пьезоэлемент П1, который излучает электромеханические колебания в движущуюся среду. Эти колебания воспринимаются через некоторое время пьезоэлементом П2, преобразуются им в электрический импульс, попадающий в электронное устройство и снова направляемый им на пьезоэлемент П1 и т.д. Контур П1-П2 характеризуется частотой f1 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной разности между скоростью распространения звука в контролируемой среде и скоростью самой среды. Аналогично электронное устройство подает импульсы в обратном направлении, то есть от пьезоэлемента П2 к пьезоэлементу П1. Контур П2-П1 характеризуется частотой f2 повторений импульсов, прямо пропорциональной расстоянию между пьезоэлементами и обратно пропорциональной сумме скоростей распространения звука в среде и самой среды. Далее электронное устройство определяет разность Df указанных частот, которая пропорциональна скорости (расходу) среды.
Эти приборы не вызывают потерь давления, обладают высоким быстродействием и обеспечивают измерение пульсирующих расходов (частота 5-10 кГц) любых не содержащих газовых включений жидкостей (в т. ч. вязких и агрессивных), а также газов и паров. Диаметр трубопроводов 10-3000 мм и более; температура среды от —40 до 200°С (реже-от —250 до 250 °C), давление до 4 МПа; диапазон измерений 100:1. Погрешность 1,0-2,5% от макс. расхода.Вихревые расходомеры (рис. 2, е). Действие их основано на зависимости между расходом и частотой возникновения вихрей за твердым телом (например, металлическим прямоугольным стержнем), которое расположено в потоке жидкости или газа. Образованию вихрей способствует поочередное изменение давления па гранях этого тела. Диапазон частот образования вихрей определяется размером и конфигурацией тела и диаметром трубопроводов (25-300 мм). Температура среды обычно от - 50 до 400 °С, реже от -270 до 450 °С; давление до 4 МПа, иногда до -6,3 МПа; диапазон измерений: для жидкостей 12:1, для газов 40:1. Градуировка приборов не зависит от плотности и вязкости контролируемой среды, а также от ее температуры и давления. Погрешность 0,5-1,0% от измеряемой величины при числах Рейнольдса Re > 30000; при Re < 10000 определение расхода практически невозможно из-за отсутствия вихрей.
Объемные расходомеры (рис. 2,ж). В качестве измерителей объема служат счетчики с цилиндрическими или овальными шестернями, поршневые, с плавающей шайбой, лопастные, винтовые и другие. Они снабжены устройствами выдачи сигналов, пропорциональных объемному расходу вещества. Эти приборы пропускают определенный объем жидкости за один цикл хода чувствительного элемента. Мера расхода - число таких циклов. Диаметр трубопроводов 15-300 мм; температура среды до 150°С, давление до 10 МПа; диапазон измерений до 20:1. Основное достоинство - стабильность показаний. Недостатки: необходимость установки фильтров, задерживающих твердые частицы (чувствительный элемент при их проникновении может выйти из строя); износ движущихся деталей, приводящий к увеличению погрешности показаний, которая обычно составляет 0,5-1,0 от измеряемой величины.
Струйные расходомеры (рис. 2,з). В них используется принцип действия генератора автоколебаний. В приборе часть струи потока жидкости или газа ответвляется и через так называемый канал обратной связи а поступает на вход устройства, создавая поперечное давление на струю. Последняя перебрасывается к противоположной стенке трубопровода, где от нее снова ответвляется часть потока, подаваемая через канал б на вход прибора; в результате струя переходит в первоначальное положение и т. д. Такой переброс происходит с частотой, пропорциональной расходу контролируемой среды, и сопровождается изменением давления в каналах а и б, что позволяет датчику давления воспринимать автоколебания. Диаметр трубопроводов 2-25 мм; температура среды от —263 до 500 °С, давление до 4 МПа; диапазон измерений 10:1. Основное достоинство - отсутствие подвижных элементов. Погрешность-1,5% от макс. расхода.
Корреляционные расходомеры (рис. 2, и). В этих приборах с помощью сложных ультразвуковых и иных устройств осуществляется запоминание в заданном сечении трубопровода (I) характерного "образа" потока контролируемой среды и его последнее распознавание в другом сечении (II), расположенном на определенном расстоянии от первого. Мера расхода - время прохождения "образом" потока участка трубопровода между сечениями. Диаметр трубопроводов 15-900 мм; температура среды до 100-150°С, давление до 20 МПа; диапазон измерений 10:1. Достоинства: независимость показаний от изменений плотности, вязкости, электропроводности и других параметров жидкости; отсутствие потерь давления. Погрешность 1 % от измеряемой величины.
[ http://www.chemport.ru/data/chemipedia/article_3233.html]
Недопустимые, нерекомендуемые
Тематики
Синонимы
EN
DE
FR
14. Расходомер жидкости (газа)
Расходомер
Ндп. Измеритель расхода жидкости (газа)
D. Durchflußmeßgerät
E. Flowmeter
F. Débitmètre
Измерительный прибор или совокупность приборов, предназначенных для измерения расхода жидкости (газа)
Источник: ГОСТ 15528-86: Средства измерений расхода, объема или массы протекающих жидкости и газа. Термины и определения оригинал документа
Англо-русский словарь нормативно-технической терминологии > flowmeter
-
8 III
- Характеристики
- Требования к исходным материалам
- Рабочая документация архитектурно-строительной части памятника в целом.
- Паяные узлы
- Минимальное обязательное количество зеркал заднего вида
- максимальный уровень
- конденсатор или RC-сборка класса X
- вычислитель
- Внутренние зеркала заднего вида (класс I)
1.5.3 конденсатор или RC-сборка класса X (capacitor or RC-unit of class X): Конденсатор или RC-сборка, применяемые в случаях, когда пробой конденсатора или RC-сборки не ведет к опасности поражения электрическим током.
Конденсаторы класса X подразделяют на три подкласса (см. таблицу IA) в соответствии с импульсным пиковым напряжением, наложенным на напряжение сети, воздействию которых они могут быть подвергнуты при эксплуатации. Такое импульсное напряжение может возникать из-за разрядов молний на наружных линиях, от включения соседнего оборудования или аппаратуры, в которой применяется конденсатор.
Таблица IA
Подкласс
Пиковое импульсное напряжение при эксплуатации, кВ
Категория сборки по МЭК 60664-1
Применение
Пиковое импульсное напряжение UP,подаваемое перед испытанием на срок службы, кВ
Х1
>2,5
£4,0
III
При высоких импульсных напряжениях
При Сном £ 1,0 мкФ UР= 4;
при Сном > 1,0 мкФ
UР=

Х2
£2,5
II
Общего назначения
При Сном £ 1,0 мкФ UР = 2,5;
при Сном > 1,0 мкФ
UР=

Х3
£1,2
-
Общего назначения
Не подается
Примечание - Коэффициент, используемый при уменьшении UРдля значений емкости более 1,0 мкФ, дает возможность поддерживать постоянным значение произведения 1/2Сном · U
 для этих значений емкости.
для этих значений емкости.Источник: ГОСТ Р МЭК 60384-14-2004: Конденсаторы постоянной емкости для электронной аппаратуры. Часть 14. Групповые технические условия на конденсаторы постоянной емкости для подавления электромагнитных помех и соединения с питающими магистралями оригинал документа
3.5 Паяные узлы
Термины, относящиеся к паяным узлам, приведены на рисунках 4 и 5.
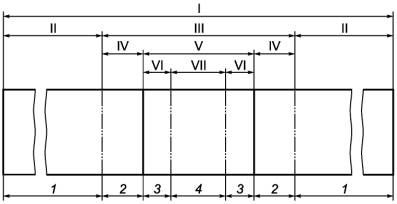
Термины, относящиеся к деталям
Паяный узел/деталь
I
Зона основного материала
II
Паяное соединение
III
Зона термического влияния
IV
Паяный шов
V
Диффузионная/переходная зона
VI
Зона металла припоя
VII
Термины, относящиеся к материалам
Основной материал
1
Основной материал, претерпевший изменения при пайке
2
Диффузионная (переходная) зона
3
Металл припоя
4
Рисунок 4 - Термины, относящиеся к деталям и материалам паяных узлов
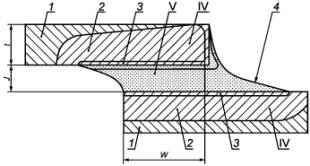
Материал
1 - основной материал;
2 - основной материал, претерпевший изменения при пайке;
3 - диффузионная (переходная) зона;
4 - металл припоя
Узел
IV - зона термического влияния,
V - паяный шов
Размеры
t - толщина детали,
J - эффективная ширина соединения,
W - длина нахлестки
Рисунок 5 - Схема паяного соединения
Источник: ГОСТ Р ИСО 857-2-2009: Сварка и родственные процессы. Словарь. Часть 2. Процессы пайки. Термины и определения оригинал документа
5.2 Характеристики
5.2.1 Краны должны обеспечивать подачу воды на смыв при минимальном рабочем давлении 0,1 МПа в количествах и с расходами, указанными в таблице 1.
Таблица 1
Условный проход крана Dy, мм
Расход воды, л/с
Количество воды, поступающей на смыв за один цикл, л
мин.
макс.
мин.
макс.
10, 15
0,2
1,0
0,6
4,0
20
1,0
1,7
4,0
7,0
25
1,5
2,0
6,0
8,0
5.2.2 Краны должны иметь устройство для регулирования количества воды, подаваемой на смыв.
5.2.3 Краны должны быть герметичны и выдерживать пробное давление воды не менее 1,6 МПа для кранов I группы и не менее 0,9 МПа - для кранов II группы.
5.2.4 Краны должны обеспечивать плотное закрытие при рабочих давлениях до 1,0 МПа для кранов I группы и до 0,6 МПа - для кранов II группы.
5.2.5 Конструкция крана должна исключать возможность обратного всасывания загрязненной воды в водопроводную сеть из промываемых приборов при возникновении разрежения в системе водопровода до 0,08 МПа. При этом высота подъема воды в смывной трубе не должна превышать 250 мм.
5.2.6 Конструкция крана должна обеспечивать такое его закрытие, при котором давление воды в водопроводной сети перед ним не должно увеличиваться более чем на 50% по сравнению со статическим давлением.
5.2.7 Усилие на пусковое устройство (ручка, кнопка) крана, необходимое для его открытия, не должно быть более 35 Н, а открывание и закрывание вентиля должно происходить при крутящем моменте не более 2Н × м при давлениях, указанных в п. 5.2.4.
5.2.8 Технический ресурс кранов с учетом замены резино-технических изделий должен составлять не менее 100000 рабочих циклов, наработка до отказа - не менее 50000 циклов.
5.2.9 Краны должны классифицироваться по трем акустическим группам I, II, III в зависимости от значения La - уровня шума арматуры в дБА или Ds - приведенной разности уровней в дБА в соответствии с таблицей 2 для вновь разрабатываемой водоразборной арматуры.
Таблица 2 Уровень шума в дБА
Акустическая группа
Ds
La
I
³ 25
£ 20
II
³ 25
£ 30
III
< 15
< 50
5.2.10 Параметр шероховатости видимых в условиях эксплуатации поверхности деталей с защитно-декоративным гальваническим покрытием должен быть Ra £ 0,63 по ГОСТ 2789.
5.2.11 Наружная видимая после монтажа поверхность крана из цветных металлов должна иметь защитно-декоративное гальваническое покрытие вида Н9.б.Х.б по ГОСТ 9.303.
Допускается применение других видов защитно-декоративных покрытий, обеспечивающих качество защиты и декоративность в течение установленного ресурса.
5.2.12 Защитно-декоративное покрытие должно быть сплошным, не иметь отслаивания покрытия и др. дефектов и должно удовлетворять ГОСТ 9.301.
5.2.13 Детали, изготовленные из пластмасс, не должны иметь трещин, вздутий, наплывов, раковин, следов холодного спая и посторонних включений, видимых без применения увеличительных приборов. Выступы или углубления в местах удаления литников не должны превышать 1 мм, а следы от разъема пресс-форм - не более 0,5 мм.
Не допускаются отклонения формы деталей, влияющие не качество их сопряжений.
5.2.14 Детали крана, изготовленные из металла, не должны иметь видимых дефектов (вмятин, гофр, царапин и др.).
5.2.15 Основные размеры метрической резьбы должны соответствовать требованиям ГОСТ 24705 с допусками по ГОСТ 16093, степень точности 7Н - для внутренней и 8g - для наружной резьбы.
Резьба должна быть чистой и не иметь поврежденных витков. Сбеги резьб, недорезы проточки и фаски должны выполняться по ГОСТ 10549. Не допускается наличие сорванных витков, а также заусенцы на поверхности резьбы, препятствующие соединению деталей.
Источник: ГОСТ 11614-94: Краны смывные полуавтоматические. Технические условия оригинал документа
7.1.1 Внутренние зеркала заднего вида (класс I)
Отражающая поверхность должна иметь такие размеры, чтобы в них можно было вписать прямоугольник, одна из сторон которого равна 4 см, а другая α,если
7.1.2 Внешние зеркала заднего вида (классы II и III)
7.1.2.1 Отражающая поверхность должна иметь такие размеры, чтобы в них можно было вписать:
7.1.2.1.1 прямоугольник, высота которого составляет 4 см, а основание, измеренное в сантиметрах, равно α;
7.1.2.1.2 сегмент, параллельный высоте прямоугольника, длина которого, выраженная в сантиметрах, равна b.
7.1.2.2 Минимальные значения α и b приведены в следующей таблице.
Классы зеркал заднего вида
Категория транспортных средств, для которых предназначены зеркала заднего вида
α
β
II
М2, М3, N2 и N3

20
III
M1 и N1, N2 и N3 (в случае применения предписаний 16.2.1.3)

7
Источник: ГОСТ Р 41.46-99: Единообразные предписания, касающиеся официального утверждения зеркал заднего вида и механических транспортных средств в отношении установки на них зеркал заднего вида оригинал документа
16.2.1 Минимальное обязательное количество зеркал заднего вида
16.2.1.1 Для транспортных средств категорий М и N предписываемое в 16.5 поле обзора должно обеспечиваться минимальным обязательным количеством зеркал заднего вида, указанным в таблице.
16.2.1.2 Однако в случае транспортных средств категорий М1 и N1:
16.2.1.2.1 если внутреннее зеркало заднего вида не отвечает предписаниям 16.5.2, то на транспортном средстве должно быть установлено дополнительное внешнее зеркало заднего вида. Это зеркало устанавливают с правой стороны транспортного средства в странах с правосторонним движением и с левой стороны - в странах с левосторонним движением;
Категория транспортного средства
Внутренние зеркала заднего вида класса I
Количество зеркал заднего вида
Основные зеркала классов
Широкоугольные зеркала класса IV
Зеркала бокового обзора класса V
II
III
M1
1
(см. также
16.2.1.2)
-
(см. также 16.2.1.2.3)
1 Устанавливается на стороне, противоположной стороне направления движения (см. также 16.2.2.1)
-
-
М2
-
2
(по одному с левой и правой сторон)
-
(см. также 16.2.2.4)
(см. также 16.2.2.2 и 16.3.7)
М3
-
2
(по одному с левой и правой сторон)
-
(см. также 16.2.2.4)
(см. также 16.2.2.2 и 16.3.7)
N1
1
(см. также 16.2.1.2)
(см. также 16.2.1.2.3)
1 Устанавливается на стороне, противоположной стороне направления движения (см. также 16.2.2.1)
-
-
N2 ≤ 7,5 т
-
(см. также 16.2.2.3)
2
(по одному с левой и правой сторон)
-
(см. также 16.2.1.3)
(см. также 16.2.2.4 и 16.2.1.4)
-
(см. также 16.2.2.2 и 16.3.7)
N2 ≥ 7,5 т
-
(см. также 16.2.2.3)
2
(по одному с левой и правой сторон)
-
(см. также 16.2.1.3)
1
-
1
(см. также 16.3.7)
N3
-
(см. также 16.2.2.3)
2
(по одному с левой и правой сторон)
-
(см. также 16.2.1.3)
1
-
1
(см. также 16.3.7)
Источник: ГОСТ Р 41.46-99: Единообразные предписания, касающиеся официального утверждения зеркал заднего вида и механических транспортных средств в отношении установки на них зеркал заднего вида оригинал документа
1.2. Характеристики
1.2.1. Качественные показатели зол различных видов должны соответствовать требованиям, указанным в таблице.
Наименование показателя
Вид сжигаемого угля
Значение показателя в зависимости от вида золы
I
II
III
IV
1. Содержание оксида кальция (СаО), % по массе:
для кислой золы, не более
Любой
10
10
10
10
для основной золы, св.
Бурый
10
10
10
10
в том числе:
свободного оксида кальция (СаОсв) не более:
для кислой золы
Любой
Не нормируется
для основной золы
Бурый
5
5
Не нормируется
2
2. Содержание оксида магния (MgO), % по массе, не более
Любой
5
5
Не нормируется
5
3. Содержание сернистых и сернокислых соединений в пересчете на SO3, % по массе, не более:
для кислой золы
Любой
3
5
3
3
для основной золы
Бурый
5
5
6
3
4. Содержание щелочных оксидов в пересчете на Na2O, % по массе, не более:
для кислой золы
Любой
3
3
3
3
для основной золы
Бурый
1,5
1,5
3,5
1,5
5. Потеря массы при прокаливании (п.п.п.), % по массе, не более:
для кислой золы
Антрацитовый
20
25
10
10
Каменный
10
15
7
5
Бурый
3
5
5
2
для основной золы
Бурый
3
5
3
3
6. Удельная поверхность, м2/кг, не менее:
для кислой золы
Любой
250
150
250
300
для основной золы
Бурый
250
200
150
300
7. Остаток на сите № 008, % по массе, не более:
для кислой золы
Любой
20
30
20
15
для основной золы
Бурый
20
20
30
15
Примечания:
1. Допускается в основных золах содержание свободного оксида кальция СаОсв и оксида магния MgO выше указанного в таблице, если обеспечивается равномерность изменения объема образцов при испытании их в автоклаве или применение этих зол обосновано специальными исследованиями бетона по долговечности с учетом конкретных условий эксплуатации.
2. Допускается в золах содержание сернистых и сернокислых соединений и потеря массы при прокаливании выше указанных в таблице, если применение этих зол обосновано специальными исследованиями по долговечности бетонов и коррозионной стойкости арматуры.
3. Допускается в золах I - III видов больший остаток на сите № 008 и меньшая величина удельной поверхности, чем указано в таблице, если при применении этих зол обеспечиваются заданные показатели качества бетона.
1.2.2. Золы в смеси с портландцементом должны обеспечивать равномерность изменения объема при испытании образцов кипячением в воде, а основные золы III вида - в автоклаве.
1.2.3. Влажность золы должна быть не более 1 % по массе.
1.2.4. Золы-уноса в зависимости от величины суммарной удельной эффективной активности естественных радионуклидов Аэфф применяют:
для производства материалов, изделий и конструкций, применяемых для строительства и реконструкции жилых и общественных зданий при Аэфф до 370 Бк/кг;
для производства материалов, изделий и конструкций, применяемых для строительства производственных зданий и сооружений, а также строительства дорог в пределах территорий населенных пунктов и зон перспективной застройки при Аэфф свыше 370 Бк/кг до 740 Бк/кг.
При необходимости в национальных нормах, действующих на территории государства, величина удельной эффективной активности естественных радионуклидов может быть изменена в пределах норм, указанных выше.
Источник: ГОСТ 25818-91**: Золы-уноса тепловых электростанций для бетонов. Технические условия
4.2 Требования к исходным материалам
4.2.1 Для приготовления смесей следует применять нефтяные дорожные битумы марок БНД(БН) 90/130 и 60/90 по ГОСТ 22245-90*.
4.2.2 Для пластификации старого битума, содержащегося в грануляте, рекомендуется использовать менее вязкие битумы и добавки поверхностно-активных веществ катионного типа. В качестве пластифицирующих добавок при производстве смесей с добавками гранулята допускается применение жидких дорожных битумов марок МГ и МГО по ГОСТ 11955-82*.
4.2.3 В качестве крупных фракций минерального материала следует применять щебень из плотных горных пород с максимальным размером зерен 20 мм для мелкозернистых смесей и 40 мм - для крупнозернистых смесей по ГОСТ 8267-93*.
4.2.4 Физико-механические свойства щебня должны отвечать требованиям ГОСТ 9128-97* в зависимости от вида, типа и марки выпускаемой асфальтобетонной смеси.
4.2.5 Песок для приготовления смесей должен отвечать требованиям ГОСТ 8736-93* и ГОСТ 9128-97*.
4.2.6 Для приготовления смесей следует применять минеральный порошок, отвечающий требованиям ГОСТ Р 52129-2003.
4.2.7 В качестве гранулята следует использовать продукты холодного фрезерования асфальтобетонных покрытий в виде крошки или гранулята асфальтобетонного лома, прошедшего предварительное измельчение в дробильно-сортировочной установке.
4.2.8 Максимальный размер гранулята старого асфальтобетона должен быть не более 20 мм.
4.2.9 Перед подбором состава асфальтобетонной смеси и ее приготовлением партию старого асфальтобетона следует испытать в лаборатории для определения среднего зернового состава минеральной части и среднего содержания битума. Минимальный объем партии гранулята должен быть достаточным для непрерывной работы асфальтосмесительной установки в течение одной смены.
4.2.10 Гранулят в каждой партии должен быть однородным по составу. Коэффициент вариации содержания щебня (фр. 5 - 20 мм) и песка (фр. 0,071 - 5 мм) в партии гранулята не должен превышать 0,25. Коэффициент вариации содержания зерен размером менее 0,071 мм и битума не должен превышать 0,20. При больших значениях коэффициента вариации штабель гранулята асфальтовой крошки следует перемешивать для придания однородности материалу.
4.2.11 Физико-механические свойства асфальтобетонов с добавкой гранулята должны отвечать требованиям ГОСТ 9128-97*. Кроме этого, предел прочности при сжатии плотных асфальтобетонов всех типов при температуре 50 °С не должен превышать для марки I - 1,8, марки II - 2,0, марки III - 2,ЗМПа. Данное требование не распространяется на результаты испытаний образцов, отформованных вторично из вырубок и кернов, отобранных из уплотненного покрытия.
4.2.12 Составы асфальтобетонных смесей с добавками гранулята следует подбирать в лаборатории с выполнением всех требований ГОСТ 9128-97* и настоящих ТР. При подборе состава смеси необходимо принимать в расчет средний состав и свойства старого асфальтобетона в заготовленной партии, определяемые в соответствии с ГОСТ 12801-98*. При этом размеры зерен минеральной части старого асфальтобетона менее 0,63 мм, от 0,36 до 5 мм и более 5 мм принимаются как части минерального порошка, песка и щебня соответственно, а содержание битума в составе гранулята - как часть битума в проектируемой смеси.
4.2.13 Температура смеси при выпуске из смесителя должна отвечать требованиям ГОСТ 9128-97*.
4.2.14 Показатель однородности асфальтобетонов с добавкой гранулята, определяемый по величине коэффициента вариации прочности на сжатие при температуре 50°С, должен соответствовать указанному в таблице 1.
Таблица 1 - Требования к однородности смесей
Наименование показателя
Значения коэффициента вариации по маркам, не более
I
II
III
Прочность на сжатие при температуре 50 °С
0,16
0,18
0,20
5.1.2. Рабочая документация архитектурно-строительной части памятника в целом.
Таблица 5.7.
№№ п.п.
Объем памятника, в тыс. куб.м.
Базовая цена, руб.
Категории сложности
I
II
III
IV
а
б
в
г
1.
до 0,25
6433
7301
9241
12416
2.
0,5
7736
8799
11165
14994
3.
1,0
8697
99999
12832
17496
4.
3,0
12348
14100
17972
24312
5.
5,0
15300
17496
22329
30260
6.
10,0
21385
24499
31315
42505
7.
20,0
29562
33894
43382
58946
8.
30,0
35476
40693
52112
70842
9.
50,0
55380
63592
81504
110896
10.
70,0
84516
97085
204103
169493
11.
100,0
115466
132689
170199
231764
12.
150,0
167288
192281
246699
336015
13.
200,0
219180
251975
323327
440435
14.
На каждые 50,0 более 200,0
44088
50759
65149
88763
3.21 вычислитель: Средство измерительной техники, которое преобразовывает выходные сигналы средств измерений объема и расхода газа, измерительных преобразователей параметров потока и среды и вычисляет объем газа, приведенный к стандартным условиям.
Примечание - Для вычислителя нормируют предел допускаемой погрешности преобразования входных сигналов и погрешность вычислений».
Раздел 4. Четвертый абзац изложить в новой редакции:
«ПР - преобразователь расхода;».
Подраздел 5.1.Третий, четвертый абзацы. Заменить слова: «более 105 м3/ч» на «от 105 м3/ч включ.»; «более 2 × 104 до 105 м3/ч включ.» на «от 2 × 104 до 105 м3/ч включ.»;
седьмой - последний абзацы изложить в новой редакции:
«По назначению СИКГ подразделяют на следующие классы:
- А - СИКГ, предназначенные для выполнения измерений в целях проведения взаимных расчетов;
- Б - СИКГ, предназначенные для выполнения измерений объемов газа, потребляемого на собственные технологические и инфраструктурные нужды (выработка электроэнергии, котельные, печи подогрева нефти, печи УПСВ, путевые подогреватели и т. п.);
- В - СИКГ, предназначенные для выполнения измерений объемов газа, сбрасываемых в атмосферу и сжигаемых на факелах (установки сброса газа на свечу, факельные установки и т. п.)».
Подраздел 5.2. Таблицу 1 изложить в новой редакции:
Таблица 1
Категория
Пределы допускаемой относительной
А
Б
В
I
±1,5
±2,5
±5,0
II
±2,0
±2,5
±5,0
III
±2,5
±3,0
±5,0
IV
±3,0
±4,0
±5,0
Примечание - При отсутствии технических решений, обеспечивающих однофазность потока по измерительной линии, для всех категорий и классов СИКГ пределы допускаемой относительной погрешности измерений объема свободного нефтяного газа, приведенного к стандартным условиям, составляют не более ±5 %».
Подпункт 5.3.4.3. Первый абзац изложить в новой редакции:
«Относительную погрешность объема газа, приведенного к стандартным условиям, по результатам измерений при помощи СИ объема (объемного расхода) при рабочих условиях определяют при отсутствии в составе СИ корректора или вычислителя и при их наличии»;
формула (3). Экспликацию изложить в новой редакции:
«
 p - коэффициент влияния давления на объем газа, приведенный к стандартным условиям;
p - коэффициент влияния давления на объем газа, приведенный к стандартным условиям;dp - относительная погрешность измерений давления газа;
 - коэффициент влияния температуры на объем газа, приведенный к стандартным условиям;
- коэффициент влияния температуры на объем газа, приведенный к стандартным условиям;dТ - относительная погрешность измерений температуры газа;
 - относительная погрешность определения коэффициента сжимаемости газа.»;
- относительная погрешность определения коэффициента сжимаемости газа.»;Источник: 1:
3.28 максимальный уровень: Максимально допустимый уровень наполнения резервуара жидкостью при его эксплуатации, установленный технической документацией на резервуар».
Раздел 4. Наименование изложить в новой редакции: «4 Методы поверки».
Пункт 4.1 после слова «методом» изложить в новой редакции:
«Допускаются:
- комбинация геометрического и объемного методов поверки, например, определение вместимости «мертвой» полости или вместимости резервуара в пределах высоты неровностей днища объемным методом при применении геометрического метода поверки;
- комбинация динамического объемного и статического объемного методов поверки».
Пункты 5.1.1 (таблица 1, головка), 5.1.2. Заменить значение: 50000 на 100000.
Подраздел 5.2. Наименование. Заменить слово: «основных» на «рабочих эталонов».
Подпункты 5.2.1.1, 5.2.1.2, 5.2.1.10, 5.2.2.5 изложить в новой редакции:
«5.2.1.1 Рулетки измерительные 2-го класса точности с верхними пределами измерений 10, 20, 30 и 50 м по ГОСТ 7502.
5.2.1.2 Рулетки измерительные с грузом 2-го класса точности с верхними пределами измерений 10, 20 и 30 м по ГОСТ 7502.
5.2.1.10 Штангенциркуль с диапазонами измерений: от 0 до 125 мм; от 0 до 150 мм; от 150 до 500 мм; от 500 до 1600 мм (черт. 3) по ГОСТ 166.
5.2.2.5 Рулетки измерительные с грузом 2-го класса точности с пределами измерений 10, 20 и 30 м по ГОСТ 7502».
Подраздел 5.2 дополнить подпунктами - 5.2.1.19, 5.2.2.9:
«5.2.1.19 Анализатор течеискатель АНТ-3.
5.2.2.9 Анализатор течеискатель АНТ-3».
Пункт 5.2.4. Заменить слова: «Основные средства поверки резервуаров» на «Применяемые рабочие эталоны и средства поверки».
Пункт 5.2.5 дополнить словами: «по взрывозащищенности - ГОСТ 12.1.011».
Подпункт 5.3.1.4 изложить в новой редакции:
«5.3.1.4 Резервуар при первичной поверке должен быть порожним. При периодической и внеочередной поверках в резервуаре может находиться жидкость до произвольного уровня, а в резервуаре с плавающим покрытием - до минимально допустимого уровня, установленного в технологической карте резервуара.
Плавающая крыша должна быть освобождена от посторонних предметов (от воды и других предметов, не относящихся к плавающей крыше)».
Подпункт 5.3.1.5 до слов «В этом случае» изложить в новой редакции:
«При наличии жидкости в резервуаре для нефтепродукта при его поверке (периодической или внеочередной) допускается использовать результаты измерений вместимости «мертвой» полости, полученные ранее, и вносить их в таблицу Б.9 приложения Б, если изменение базовой высоты резервуара по сравнению с результатами ее измерений в предыдущей поверке составляет не более 0,1 %, а изменения степени наклона и угла направления наклона резервуара составляют не более 1 %»;
подпункт дополнить примечанием:
«Примечание - Вместимость «мертвой» полости резервуара для нефти и нефтепродуктов, образующих парафинистые отложения, при проведении периодической и внеочередной поверок допускается принимать равной ее вместимости, полученной при первичной поверке резервуара или полученной при периодической поверке резервуара после его зачистки».
Подпункт 5.3.2.1. Примечание после слов «до плюс 2 °С - при применении дизельного топлива» дополнить словами: «и воды;».
Пункт 5.3.3 исключить.
Пункт 6.1 после слов «(государственной) метрологической службы» дополнить знаком сноски:1); дополнить сноской:
«1) На территории Российской Федерации орган государственной метрологической службы проходит аккредитацию на право проведения поверки резервуаров».
Пункт 6.2 изложить в новой редакции:
«6.2 Поверки резервуара проводят:
- первичную - после завершения строительства резервуара или капитального ремонта и его гидравлических испытаний - перед вводом его в эксплуатацию;
- периодическую - по истечении срока межповерочного интервала;
- внеочередную - в случаях изменения базовой высоты резервуара более чем на 0,1 % по 9.1.10.3; при внесении в резервуар конструктивных изменений, влияющих на его вместимость, и после очередного полного технического диагностирования».
Пункт 7.1. Заменить слова: «в установленном порядке» на «и промышленной безопасности в установленном порядке2)».
Пункт 7.1, подпункт 7.1.1 дополнить сноской - 2):
«2) На территории Российской Федерации действует Постановление Росгортехнадзора № 21 от 30.04.2002».
Пункт 7.1 дополнить подпунктом - 7.1.1:
«7.1.1 Измерения величин при поверке резервуара проводит группа лиц, включающая поверителя организации, указанной в 6.1, и не менее двух специалистов, прошедших курсы повышения квалификации, и других лиц (при необходимости), аттестованных по промышленной безопасности в установленном порядке2)».
Пункт 7.3 дополнить подпунктом - 7.3.3:
«7.3.3 Лица, выполняющие измерения, должны быть в строительной каске по ГОСТ 12.4.087».
Пункт 7.6. Заменить слова: «или уровень» на «и уровень».
Пункт 7.8 дополнить словами: «и должен быть в строительной каске по ГОСТ 12.4.087».
Пункт 7.9 изложить в новой редакции:
«7.9 Средства поверки по 5.2.1.4, 5.2.1.17, 5.2.1.19 при поверке резервуара геометрическим методом, средства поверки по 5.2.2.1, 5.2.2.2, 5.2.2.8, 5.2.2.9, 5.2.5 при поверке объемным методом должны быть во взрывозащищенном исполнении для групп взрывоопасных смесей категории II В-ТЗ по ГОСТ 12.1.011 и предназначены для эксплуатации на открытом воздухе».
Пункт 7.10 после слова «резервуара» дополнить словами: «в рабочей зоне»;
заменить слова: «на высоте 2000 мм» на «(на высоте 2000 мм)».
Подпункт 8.2.8 исключить.
Подпункт 9.1.1.1 изложить в новой редакции:
«9.1.1.1 Длину окружности Lн измеряют на отметке высоты:
- равной 3/4 высоты первого пояса, если высота пояса находится в пределах от 1500 до 2250 мм;
- равной 8/15 высоты первого пояса, если высота пояса составляет 3000 мм.
При наличии деталей, мешающих измерениям, допускается уменьшать высоту на величину до 300 мм от отметки 3/4 или 8/15 высоты первого пояса».
Подпункт 9.1.1.7 после слов «динамометра усилием» изложить в новой редакции:
«(100 ± 10) Н - для рулеток длиной 10 м и более;
(10 ± 1) Н - для рулеток длиной 1 - 5 м.
Для рулеток с желобчатой лентой - без натяжения».
Подпункт 9.1.1.13. Формула (3). Знаменатель. Заменить знак: «-» на «+».
Подпункт 9.1.1.17. Последний абзац изложить в новой редакции:
«Значение поправок (суммарных при наличии двух и более) на обход в миллиметрах вносят в протокол, форма которого приведена в приложении Б».
Подпункт 9.1.2.2 изложить в новой редакции:
«9.1.2.2 Окружность первого пояса резервуара, измеренную по 9.1.1, разбивают на равные части (откладывают дугу постоянной длины и наносят вертикальные отметки на стенке первого пояса), начиная с образующей резервуара, находящейся в плоскости А (рисунок А.10а), проходящей через точку измерений уровня жидкости и базовой высоты резервуара на направляющей планке измерительного люка и продольную ось резервуара, с соблюдением следующих условий:
- число разбивок должно быть четным;
- число разбивок в зависимости от вместимости резервуара выбирают по таблице 3.
Таблица 3
Наименование показателя
Значение показателя для вместимости резервуара, м3, не менее
100
200
300
400
700
1000
2000
3000
5000
10000
20000
30000
50000
100000
Число разбивок
24
26
28
30
32
34
36
38
40
42
44
46
48
52
Все отметки разбивок пронумеровывают по часовой стрелке в соответствии с рисунком А.10».
Подпункт 9.1.2.5. Второй абзац. Заменить слова: «или ниже ребра» на «и ниже ребра».
Пункт 9.1.3 изложить в новой редакции:
«9.1.3 Определение степени наклона и угла направления наклона резервуара
9.1.3.1 Степень наклона h и угол направления наклона j резервуара определяют по результатам измерений угла и направления наклона контура днища резервуара снаружи (или изнутри) с применением нивелира с рейкой.
9.1.3.2 Степень наклона и угол направления наклона резервуара определяют в два этапа:
- на первом этапе устанавливают номера двух противоположных отметок разбивки (образующих резервуара), через которые проходит приближенное направление наклона резервуара;
- на втором этапе определяют степень наклона и угол уточненного направления наклона резервуара.
9.1.3.3 Приближенное направление наклона резервуара определяют в следующей последовательности:
а) проводят разбивку длины окружности первого пояса по 9.1.2.2;
б) освобождают утор окраек днища (далее - утор днища) резервуара от грунта;
в) устанавливают нивелир напротив первой отметки разбивки на расстоянии 5 - 10 м от резервуара и приводят его в горизонтальное положение;
г) устанавливают рейку вертикально в точке на уторе днища, находящейся напротив первой отметки разбивки, отсчитывают показание шкалы рейки l1 с погрешностью до 1 мм;
д) последовательно устанавливая рейку по часовой стрелке в точках на уторе днища, находящихся напротив отметок разбивки 2, 3,..., v, отсчитывают показания шкалы рейки l2, l3,..., lvс погрешностью до 1 мм;
е) для снятия показаний рейки в оставшихся точках отметок разбивки нивелир устанавливают на расстоянии 5 - 10 м от резервуара напротив отметки разбивки (v +1) и, устанавливая рейку вторично в точке отметки разбивки v, вторично снимают показание рейки l¢v. При этом показание рейки в точке, находящейся напротив отметки разбивки v (крайней) до перенесения нивелира на другое место lv, должно совпадать с показанием рейки в этой же точке разбивки v после перенесения нивелира на другое место, то есть l¢v с погрешностью до 1 мм. Выполнение этого условия обеспечивается регулированием высоты нивелира после перенесения его на другое место.
В случае невозможности выполнения вышеуказанного условия регулированием высоты нивелира на показание рейки в точках, находящихся напротив отметок разбивки (v + 1), (v + 2),..., s, вводят поправку, например на показание рейки в точке, находящейся напротив отметки разбивки (v + 1), l¢v+1 по формуле
lv+1 = l¢v+1 + Dl, (3a)
где l¢v+1 - показание рейки после перенесения нивелира на другое место, мм;
Dl - поправка, мм. Ее значение определяют по формуле
Dl = lv - l¢v, (3б)
где lv - показание рейки, находящейся напротив отметки v до перенесения нивелира на другое место, мм;
l¢v - показание рейки, находящейся напротив отметки v после перенесения нивелира на другое место, мм;
ж) выполняя аналогичные операции по перечислению е), отсчитывают показания рейки до отметки разбивки т (т - число отметок разбивки длины окружности первого пояса резервуара).
Показания шкалы рейки lk вносят в протокол, форма которого приведена в приложении Б (таблица Б.14).
Определяют значение разности показаний шкалы рейки в точках утора днища, находящихся напротив двух противоположных отметок разбивки Dlk, мм (см. таблицу Б.14):
- при числе отметок k от 1 до
 по формуле
по формулеDl¢k = lk - l(m/2+k); (3в)
- при числе отметок от
 до т по формуле
до т по формулеDl²k = lk - l(k-m/2), (3г)
где lk - показание шкалы рейки в точке, находящейся напротив k-й отметки, мм;
l(m/2+k), l(k-m/2) - показания шкалы рейки в точках, находящейся напротив отметок разбивки (т/2 + k) и (k - т/2), мм;
k - номер отметки разбивки. Его значения выбирают из ряда: 1, 2, 3, 4,..., т;
т - число отметок разбивки длины окружности первого пояса резервуара.
Строят график (рисунок А.10) функции Dlk, рассчитываемой по формулам (3в) и (3г). Если кривая, соединяющая точки графика Dlk относительно абсциссы, имеет вид синусоиды с периодом, равным отрезку 1 - т (кривая С на рисунке А.10), то резервуар стоит наклонно, если нет (кривая В) - резервуар стоит не наклонно.
По максимальному значению разности (Dlk)max, определенному по формуле (3в) или (3г), устанавливают приближенное направление наклона резервуара (рисунок А.10б).
Приближенное значение угла направления наклона резервуара jп определяют по формуле
 (3д)
(3д)где N - число разбивок, отсчитываемое от первой отметки разбивки до приближенного направления наклона резервуара, равное k - 1.
9.1.3.4 Степень наклона и уточненный угол направления наклона резервуара определяют в следующей последовательности:
а) проводят дополнительное разбивание длины дуги противоположных разбивок (рисунок А.10б), например находящихся справа от отметок разбивки 6 и 18 (разбивки N5 и N17) и слева от отметок разбивки 6 и 18 (разбивки N6 и N18) от приближенного направления наклона контура днища, определенного по 9.1.3.3;
б) длину дуги дополнительного разбивания DL, мм, соответствующую 1°, вычисляют по формуле

где Lн - длина наружной окружности первого пояса резервуара, мм;
в) дугу длиной, вычисленной по формуле (3е), откладывают справа и слева (наносят вертикальные отметки на стенке первого пояса), начиная с образующих (отметок разбивки), по которым проходит приближенное направление наклона резервуара. Отметки отложенных дополнительных дуг (разбивок) нумеруют арабскими цифрами справа и слева от приближенного направления наклона резервуара;
г) выполняя операции, указанные в перечислениях в) и г) 9.1.3.3, отсчитывают показания шкалы рейки в точках дополнительного разбивания дуг основных разбивок, находящихся слева lл и справа lп от приближенного направления наклона резервуара, с погрешностью до 1 мм.
Результаты показаний шкалы lл, lп вносят в протокол, форма которого приведена в приложении Б».
Подпункт 9.1.6.1 изложить в новой редакции:
«9.1.6.1. Высоту поясов hн измеряют с наружной стороны резервуара вдоль образующей резервуара, находящейся в плоскости А (рисунок А.10а) по 9.1.2.2, при помощи измерительной рулетки с грузом и упорного угольника».
Подпункт 9.1.7.1 после слов «от днища резервуара» изложить в новой редакции: «и от стенки первого пояса резервуара lд угла j1 между плоскостью А и плоскостью С (рисунок А.10а). Значение угла j1 определяют методом разбивания длины окружности первого пояса с погрешностью ± 1° в следующей последовательности:
- длину окружности первого пояса изнутри резервуара разбивают на восемь частей, начиная с плоскости А (рисунок А.10а), по часовой стрелке;
- на днище резервуара через его центр и точки разбивки проводят восемь радиусов;
- устанавливают номер сектора, в пределах которого находится плоскость С (рисунок А.10а);
- в пределах вышеустановленного сектора на стенке резервуара до плоскости С откладывают (размечают) n0-ное число дополнительных хорд длиной S0, соответствующей 1°, вычисляемой по формуле
- значение угла j1 определяют по формуле
j1 = 45N0 + п0,
где N - число больших разбиваний;
п0 - число отложений хорды S0 до плоскости С.
Результаты измерений величин N0, n0, j1 вносят в протокол, форма которого приведена в приложении Б».
Подпункт 9.1.6.5 дополнить абзацем:
«Толщину слоя внутреннего антикоррозионного покрытия dс.п измеряют при помощи ультразвукового толщиномера с погрешностью до 0,1 мм».
Подпункт 9.1.6.6 перед словом «вносят» дополнить обозначением: dс.п.
Пункт 9.1.8. Наименование дополнить словами: «и параметров местных неровностей (хлопунов)».
Подпункт 9.1.8.1 изложить в новой редакции:
«9.1.8.1 Если резервуар имеет несколько приемно-раздаточных патрубков, то высоту «мертвой» полости, соответствующую j-му приемно-раздаточному патрубку (hм.п)j, измеряют рулеткой по стенке резервуара от днища резервуара до нижней точки j-го приемно-раздаточного патрубка. Нумерацию высот «мертвой» полости проводят, начиная с плоскости А (рисунок А.10а).
Если резервуар имеет приемно-раздаточные устройства, например, устройства ПРУ-Д, то измеряют рулеткой (рисунок А.17а):
- высоту по стенке резервуара от контура днища до места установки j-го приемно-раздаточного устройства hyj;
- расстояние от нижнего образующего j-го приемно-раздаточного устройства до его нижнего или верхнего среза hcj;
- длину j-го приемно-раздаточного устройства (расстояние от центра среза устройства до стенки резервуара) lcj.
Результаты измерений величин (hм.п)j, hyj, hcj, lcj в миллиметрах вносят в протокол, форма которого приведена в приложении Б».
Подпункт 9.1.8.2. Второй абзац. Заменить слова: «с восемью радиусами» на «с 24 радиусами», «восьми радиусов» на «24 радиусов», «8 равных частей» на «24 равных части»;
заменить значение: 0 - 8 на 0 - 24;
третий абзац изложить в новой редакции:
«- при отсутствии центральной трубы нивелир устанавливают в центре днища резервуара и измеряют расстояние по вертикали от неровностей днища до визирной линии (до центра окуляра) нивелира (b0) при помощи измерительной рулетки с грузом или рейкой. При наличии центральной трубы нивелир устанавливают последовательно в двух противоположных точках, не лежащих на отмеченных радиусах и отстоящих от стенки резервуара не более 1000 мм».
Пункт 9.1.8 дополнить подпунктами - 9.1.8.4 - 9.1.8.7:
«9.1.8.4 Угол j2 между плоскостью А (рисунок А.10а) и плоскостью В, проходящую через продольные оси приемно-раздаточного патрубка и резервуара, определяют с погрешностью не более ± 1°, используя данные разбивки длины окружности первого пояса по 9.1.2.2 в следующей последовательности:
- устанавливают число полных разбивок N¢0, находящихся до плоскости В (рисунок А.10а);
- по длине дуги разбивки, в пределах которой проходит плоскость В, размечают до образующей приемно-раздаточного патрубка n¢0-ное число дополнительных дуг длиной DL, соответствующей 1°. Длину дуги DL, мм, вычисляют по формуле

- значение угла j2 определяют по формуле
где m - число разбивок длины окружности первого пояса резервуара;
rп.р - радиус приемно-раздаточного патрубка, мм.
9.1.8.5 Результаты измерений величины j2 вносят в протокол, форма которого приведена в приложении Б.
9.1.8.6 В случае определения вместимости «мертвой» полости объемным статическим методом в соответствии с 9.2.2 результаты измерений оформляют протоколом поверки для «мертвой» полости по форме, приведенной в приложении В (заполняют таблицы В.4, В.6, В.8).
9.1.8.7 Площадь хлопуна sx, м2, определяют по результатам измерений длины и ширины хлопуна.
Длину lх и ширину bх хлопуна измеряют измерительной рулеткой. Показания рулетки отсчитывают с точностью до 1 мм.
Высоту хлопуна hx измеряют штангенциркулем или измерительной линейкой. Показания штангенциркуля или линейки отсчитывают с точностью до 1 мм.
Результаты измерений величин lx, bх, hx вносят в протокол, форма которого приведена в приложении Б».
Подпункт 9.1.9.1 изложить в новой редакции:
«9.1.9.1 Измеряют расстояние по горизонтали между линейкой, установленной вертикально по первой внешней образующей резервуара (рисунок А.10), и внешней образующей измерительного люка l1 (рисунок А.16) при помощи измерительной рулетки с погрешностью ± 5 мм».
Подпункт 9.1.10.1. Второй абзац изложить в новой редакции:
«При наличии жидкости в резервуарах с плавающим покрытием уровень ее должен быть не ниже уровня, установленного технологической картой на резервуар»;
дополнить абзацем:
«Базовую высоту резервуара с плавающей крышей измеряют через измерительный люк, установленный на направляющей стойке плавающей крыши или на трубе для радарного уровнемера (рисунок А.2а)».
Подпункт 9.1.10.3 изложить в новой редакции:
«9.1.10.3 Базовую высоту измеряют ежегодно. Ежегодные измерения базовой высоты резервуара проводит комиссия, назначенная приказом руководителя предприятия - владельца резервуара, в состав которой должен быть включен специалист, прошедший курсы повышения квалификации по поверке и калибровке резервуаров.
При ежегодных измерениях базовой высоты резервуара без плавающего покрытия резервуар может быть наполнен до произвольного уровня, резервуар с плавающим покрытием - до минимально допустимого уровня.
Результат измерений базовой высоты резервуара не должен отличаться от ее значения, указанного в протоколе поверки резервуара, более чем на 0,1 %.
Если это условие не выполняется, то проводят повторное измерение базовой высоты при уровне наполнения резервуара, отличающимся от его уровня наполнения, указанного в протоколе поверки резервуара, не более чем на 500 мм.
Результаты измерений базовой высоты оформляют актом, форма которого приведена в приложении Л.
При изменении базовой высоты по сравнению с ее значением, установленным при поверке резервуара, более чем на 0,1 % устанавливают причину и устраняют ее. При отсутствии возможности устранения причины проводят внеочередную поверку резервуара.
Примечание - В Российской Федерации специалисты проходят курсы повышения квалификации в соответствии с 7.1».
Подпункт 9.1.11.1 перед словом «берут» дополнить словами: «а также верхнее положение плавающего покрытия h¢п».
Подпункт 9.1.11.2 изложить в новой редакции:
«9.1.11.2 Высоту нижнего положения плавающего покрытия hп измеряют рулеткой от точки касания днища грузом рулетки до нижнего края образующей плавающего покрытия. Показания рулетки отсчитывают с точностью до 1 мм. Измерения проводят не менее двух раз. Расхождение между результатами двух измерений должно быть не более 2 мм».
Подпункт 9.1.11.3 после слов «и результаты измерений» дополнить обозначением: h¢п.
Подраздел 9.1 дополнить пунктами - 9.1.12, 9.1.13:
«9.1.12 Определение длины внутренней окружности вышестоящего пояса резервуара с плавающей крышей
9.1.12.1 При отсутствии возможности применения приспособления, показанного на рисунке А.6, длину внутренней окружности вышестоящего пояса определяют:
второго пояса (при высоте поясов от 2250 до 3000 мм) или третьего (при высоте поясов 1500 мм) - методом отложения хорд по внутренней стенке пояса;
вышестоящих поясов, начиная с третьего (при высоте поясов от 2250 до 3000 мм) или, начиная с четвертого (при высоте поясов от 1500 мм), - по результатам измерений радиальных отклонений образующих резервуара, проведенных изнутри резервуара.
9.1.12.2 Хорды откладывают на уровнях, отсчитываемых от верхней плоскости плавающей крыши:
1600 мм - при высоте поясов от 2250 до 3000 мм;
1200 мм - при высоте поясов 1500 мм.
9.1.12.3 Перед откладыванием хорд на уровне 1600 мм или на уровне 1200 мм, указанных в 9.1.12.2, при помощи рулетки с грузом через каждые 1000 мм наносят горизонтальные отметки длиной 10 - 20 мм по стенке поясов.
9.1.12.4 Отметки, нанесенные по стенкам поясов на уровнях, указанных в 9.1.12.2, соединяют между собой, применяя гибкую стальную ленту (рулетку). При этом линии горизонтальных окружностей проводят толщиной не более 5 мм.
9.1.12.5 Вычисляют длину хорды S1 по формуле
S1 = D1sin(a1/2), (3ж)
где D1 - внутренний диаметр первого пояса резервуара, вычисляемый по формуле
D1 = Lвн/p, (3и)
где Lвн - внутренняя длина окружности первого пояса, вычисляемая по формуле (Г.2);
a1 - центральный угол, соответствующий длине хорды S1 вычисляемый по формуле
a1 = 360/m1, (3к)
где т1 - число отложений хорд по линиям горизонтальных окружностей. Число т1 в зависимости от номинальной вместимости резервуара принимают по таблице 4.
Таблица 4
Номинальная вместимость резервуара, м3
Число отложений хорд т1
Номинальная вместимость резервуара, м3
Число отложений хорд т1
100
24
3000 (4000)
38
200
26
5000
40
300
28
10000
58
400
32
20000
76
700
34
30000
80
1000
34
50000
120
2000
36
100000
160
9.1.12.6 Хорду S1, длина которой вычислена по формуле (3ж), откладывают по линии горизонтальной окружности, проведенной на высоте 1600 мм и на высоте 1200 мм, указанных в 9.1.12.2, при помощи штангенциркуля (ГОСТ 166, черт. 3) с диапазоном измерений от 500 до 1600 мм.
9.1.12.7 После отложений хорд по 9.1.12.6 измеряют длину остаточной хорды Soп при помощи штангенциркуля с диапазоном измерений 0 - 150 мм с погрешностью не более 0,1 мм. Обозначение «п» соответствует термину: «покрытие».
9.1.12.8 Значения величин S1 и S0п вносят в протокол, форма которого приведена в приложении Б.
9.1.12.9 Длины внутренних окружностей поясов, находящихся выше поясов, указанных в 9.1.12.1, определяют по результатам измерений радиальных отклонений образующих резервуара от вертикали изнутри резервуара с применением измерительной каретки (далее - каретки) в следующей последовательности:
а) длину окружности первого пояса, измеренную по 9.1.1, разбивают на равные части по 9.1.2.2 (наносят вертикальные отметки на уровне 1600 мм или на уровне 1200 мм в соответствии с 9.1.12.3), начиная с плоскости А (рисунок А.10а);
б) штангу 12 с блоком 11 (рисунок А.2а), при помощи которого каретка перемещается по внутренней поверхности резервуара, устанавливают у края площадки обслуживания 13;
в) линейку 6 устанавливают на высоте 400 мм по перечислению а) 9.1.12.9 от верхней плоскости плавающей крыши при помощи магнитного держателя 7 перпендикулярно к стенке резервуара, поочередно для каждой отметки разбивки;
г) для перехода от одной отметки разбивки к другой каретку опускают, а штангу со всей оснасткой передвигают по кольцевой площадке обслуживания резервуара. Расстояние от стенки резервуара до нити отвеса а отсчитывают по линейке 6;
д) измерения вдоль каждой образующей резервуара начинают с отметки разбивки под номером один первого пояса. На каждом следующем поясе измерения проводят в трех сечениях: среднем, находящемся в середине пояса, нижнем и верхнем, расположенных на расстоянии 50 - 100 мм от горизонтального сварочного шва. На верхнем поясе - в двух сечениях: нижнем и среднем. Отсчеты по линейке снимают с погрешностью в пределах ± 1 мм в момент, когда каретка установлена в намеченной точке при неподвижном отвесе;
е) в начальный момент каретку для всех образующих резервуара останавливают на линии горизонтальной окружности на уровне 1600 мм или на уровне 1200 мм.
Результаты измерений расстояния а в миллиметрах вносят в протокол, форма которого приведена в приложении Б.
9.1.13 Высота газового пространства в плавающей крыше
9.1.13.1 Высоту газового пространства hгп (3.25) измеряют при помощи измерительной рулетки с грузом или линейкой не менее двух раз. Расхождение между результатами двух измерений не должно превышать 1 мм.
9.1.13.2 Результаты измерений hгп вносят в протокол, форма которого приведена в приложении Б».
Пункт 9.2.1 дополнить перечислением - е):
«е) угла j2 в соответствии с 9.1.8.4».
Подпункт 9.2.1.2. Заменить номер подпункта: 9.2.1.2 на 9.2.1.1;
перед словом «вносят» дополнить обозначением: j2.
Пункт 9.2.2. Наименование дополнить словами: «или в пределах высоты неровностей днища».
Подпункт 9.2.2.1 после слов «В пределах «мертвой» полости» дополнить словами: «(рисунок А.17) и в пределах неровностей днища (рисунок А.18), если неровности днища выходят за пределы «мертвой» полости;
заменить слова: «не более чем на 30 мм» на «в пределах от 10 до 100 мм».
Подпункт 9.2.2.2. Перечисление д). Заменить слова: «значения 30 мм» на «значения в пределах от 10 до 100 мм».
Пункт 9.2.3 после слов «выше «мертвой» полости» дополнить словами: «или выше высоты неровностей днища».
Подпункт 9.2.3.1 после слов «высоте «мертвой» полости» дополнить словами: «(высоте неровностей днища)».
Подпункт 9.2.3.2 после слов «в пределах «мертвой» полости» дополнить словами: «(до высоты неровностей днища)».
Подпункт 9.2.3.3. Исключить слова: «в соответствии с 9.2.2.2, 9.2.2.3».
Пункт 9.2.3 дополнить подпунктом - 9.2.3.6:
«9.2.3.6 При достижении уровня поверочной жидкости, соответствующего полной вместимости резервуара, измеряют базовую высоту резервуара Нб в соответствии с 9.1.10. Значение базовой высоты не должно отличаться от значения, измеренного по 9.2.1, более чем на 0,1 %».
Подпункт 9.2.5.1. Последний абзац. Заменить значение: ± 0,1 °С на ± 0,2 °С.
Пункт 9.2.6, подпункты 9.2.6.1, 9.2.6.2 исключить.
Подпункт 10.3.1.1. Заменить слова: «максимального уровня Hmax» на «предельного уровня Нпр»;
формулу (4) изложить в новой редакции:
 (4)»;
(4)»;экспликацию после абзаца «fл - высота точки касания днища грузом рулетки;» дополнить абзацем:
«Lвн - длина внутренней окружности 1-го пояса, вычисляемая по формуле (Г.2)».
Подпункт 10.3.1.2. Формулы (5) - (8) изложить в новой редакции:
 (5)
(5) (6)
(6) на участке от Нм.п до Нп, (7)
на участке от Нм.п до Нп, (7)где DV²в.д - объем внутренних деталей, включая объемы опор плавающего покрытия, на участке от Нм.п до Нп;
 - на участке от Нм.п до Нп. (8)»;
- на участке от Нм.п до Нп. (8)»;последний абзац, формулы (9), (10) и экспликации исключить.
Подпункт 10.3.1.5 и формулы (11) - (15) исключить.
Подпункт 10.3.2.1 изложить в новой редакции:
«10.3.2.1 Градуировочную таблицу составляют, суммируя последовательно, начиная с исходного уровня (уровня, соответствующего высоте «мертвой» полости Нм.п), вместимости резервуара, приходящиеся на 1 см высоты наполнения, в соответствии с формулой
 (16)
(16)где Vм.п - вместимость «мертвой» полости, вычисляемая по формуле (Е.12) при изменении k от 0 до v, или по формуле, приведенной в Е.13;
Vk, Vk-1 - дозовые вместимости резервуара при наливе в него k и (k - 1) доз, соответствующие уровням Нk, H(k-1), вычисляемые по формуле (Е.12) при изменении k от v + 1 до значения k, соответствующего полной вместимости резервуара, или по формулам (Е.13), (Е.14) приложения Е и т.д.
Вместимость «мертвой» полости резервуара вычисляют по формуле
где V0 - объем жидкости до точки касания днища грузом рулетки».
Пункт 11.1. Второй абзац исключить.
Пункт 11.2. Перечисление д) дополнить словами: «(только в случае проведения расчетов вручную)».
Пункт 11.3. Первый абзац после слов «в приложении В» изложить в новой редакции: «Форма акта измерений базовой высоты резервуара, составленного при ежегодных ее измерениях, приведена в приложении Л»;
последний абзац изложить в новой редакции:
«Протокол поверки подписывают поверитель и лица, принявшие участие в проведении измерений параметров резервуара»;
дополнить абзацем:
«Титульный лист и последнюю страницу градуировочной таблицы подписывает поверитель. Подписи поверителя заверяют оттисками поверительного клейма, печати (штампа). Документы, указанные в 11.2, пронумеровывают сквозной нумерацией, прошнуровывают, концы шнурка приклеивают к последнему листу и на месте наклейки наносят оттиск поверительного клейма, печати (штампа)».
Пункт 11.4 изложить в новой редакции:
«11.4 Градуировочные таблицы на резервуары утверждает руководитель организации национальной (государственной) метрологической службы или руководитель метрологической службы юридического лица, аккредитованный на право проведения поверки».
Раздел 11 дополнить пунктом - 11.6 и сноской:
«11.6 Если при поверке резервуара получены отрицательные результаты даже по одному из приведенных ниже параметров:
- значение вместимости «мертвой» полости имеет знак минус;
- размеры хлопунов не соответствуют требованиям правил безопасности1);
- значение степени наклона резервуара более 0,02, если это значение подтверждено результатами измерений отклонения окраек контура днища резервуара от горизонтали, выполненных по методике диагностирования резервуара, то резервуар считается непригодным к эксплуатации и выдают «Извещение о непригодности»;
«1) На территории Российской Федерации действует Постановление Росгортехнадзора № 76 от 09.06.2003 об утверждении Правил устройства вертикальных цилиндрических стальных резервуаров для нефти и нефтепродуктов».
Приложение А дополнить рисунками - А.2а, А.10а (после рисунка А.10), А.10б, А.10в, А.11а, А.17а;
рисунки А.10, А.14, А.15, А.16 изложить в новой редакции:
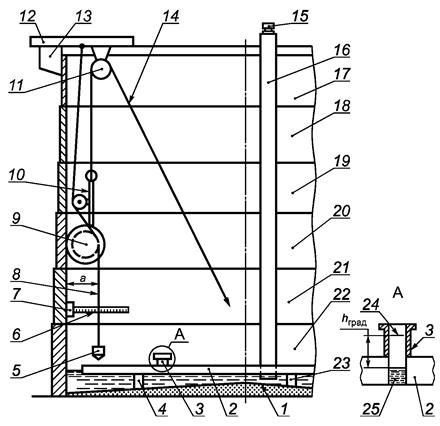
1 - неровности днища; 2 - плавающая крыша; 3, 15 - измерительный люк; 4, 23 - опоры плавающей крыши; 5 - груз отвеса; 6 - линейка;
Рисунок А.2а - Схема измерений радиальных отклонений образующих резервуара с плавающей крышей
1 - контур днища резервуара; 2 - измерительный люк; Dlk - функция, вычисляемая по формулам (3в) и (3г);
Рисунок А.10 - График функции Dlk и схема направления наклона резервуара
1 - стенка резервуара; 2 - приемно-раздаточный патрубок; 3 - измерительный люк; 4 - внутренняя деталь;
Рисунок А.10а - Схема измерений координат внутренней детали
1 - дополнительные отметки справа; 2 - уточненное направление наклона контура днища;
 j = jп - п2 = 255 - 3 = 252°
j = jп - п2 = 255 - 3 = 252°Рисунок А.10б - Схема определения угла направления наклона днища
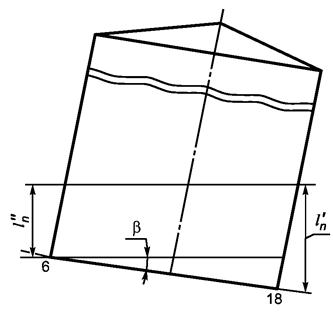
l¢n, l²n - максимальное и минимальное показания рейки по уточненному направлению наклона контура днища;
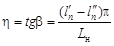
Рисунок А.10в - Схема наклоненного резервуара
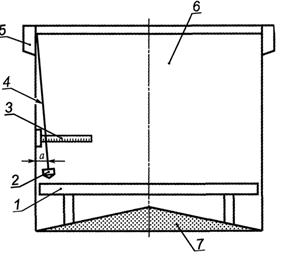
1 - плавающая крыша с опорами; 2 - груз отвеса; 3 - линейка; 4 - нить отвеса; 5 - верхняя площадка обслуживания;
Рисунок А.11а - Схема измерений степени и угла направления наклона резервуара с плавающей крышей
1 - 24 - радиусы; 25 - приемно-раздаточный патрубок; 26 - рейка; 27 - горизонт нивелира; 28 - нивелир;
Рисунок А.14 - Нивелирование днища резервуара при отсутствии центральной трубы
1 - 24 - радиусы; 25 - приемно-раздаточный патрубок; 26 - рейка; 27 - рейка в точке касания днища грузом рулетки;
Рисунок А.15 - Нивелирование днища резервуара при наличии центральной трубы
1 - кровля резервуара; 2 - измерительный люк; 3 - направляющая планка; 4 - точка измерений уровня жидкости или
Рисунок А.16 - Схема размещения измерительного люка
1, 3 - приемно-раздаточные устройства; 2 - стенка резервуара; 4 - неровности днища; 5 - контур днища;
Рисунок А.17а - Схема размещения приемно-раздаточных устройств
Приложение Б. Таблицу Б.1 изложить в новой редакции:
Таблица Б.1 - Общие данные
Код документа
Регистрационный номер
Дата
Основание для проведения поверки
Место проведения поверки
Средства измерений
Резервуар
Число
Месяц
Год
Тип
Номер
Назначение
Наличие угла наклона
Погрешность определения вместимости резервуара, %
1
2
3
4
5
6
7
8
9
10
11
12
13
Примечание - В графе 12 указывают знак «+» при наличии угла наклона, знак «-» - при его отсутствии.
таблицу Б.4 изложить в новой редакции:
Таблица Б.4 - Радиальные отклонения образующих резервуара от вертикали
Номер пояса
Точка измерения
Показание линейки а, мм
1
2
3
4
5
6
7
8
9
10
11
12
...
...
т
I
3/4h1
II
Н
С
В
III
Н
С
в
IV
н
с
в
V
н
с
в
VI
н
с
в
...
...
n
н
с
Примечание - При наличии ребра жесткости, например, в v-м поясе (9.1.2.5):
а) если ребро жесткости находится в середине пояса, то в строке «С» вносят показание линейки, определенное по формуле
где
 ,
,  - показания линейки в точках выше и ниже ребра жесткости;
- показания линейки в точках выше и ниже ребра жесткости;б) если ребро жесткости находится ближе к верхнему или нижнему сварному шву, то среднее расстояние от стенки резервуара до нити отвеса вычисляют по формуле
где
 - показание линейки в точке выше нижнего (ниже верхнего) сварного шва.
- показание линейки в точке выше нижнего (ниже верхнего) сварного шва.дополнить таблицей - Б.4.1:
Таблица Б.4.1 - Длины хорд
В миллиметрах
Уровень отложений хорды
Хорда
основная S1п
остаточная S0п
1-е измерение
2-е измерение
1600
1200
Таблица Б.5. Наименование изложить в новой редакции:
«Таблица Б.5 - Параметры поверочной и хранимой жидкостей (нефти и нефтепродуктов)»;
дополнить таблицей - Б.5.1:
Таблица Б.5.1 - Радиальные отклонения образующих первого (второго или третьего для резервуаров с плавающей крышей) и последнего n-го поясов от вертикали
В миллиметрах
Номер пояса
Радиальные отклонения образующих поясов от вертикали
1
2
3
4
5
6
7
...
...
т
I (II или III)
n
таблицу Б.6 дополнить графой - 7:
Толщина слоя антикоррозионного покрытия dс.п, мм
7
таблицы Б.7, Б.8, Б.9 изложить в новой редакции:
Таблица Б.7 - Внутренние детали цилиндрической формы
Диаметр, мм
Высота от днища, мм
Расстояние от стенки первого пояса lд, мм
Число разбиваний
Угол j1,...°
Нижняя граница hвд
Верхняя граница hвд
N0
n0
Таблица Б.8 - Внутренние детали прочей формы
Объем, м3
Высота от днища, мм
Расстояние от стенки первого пояса lд, мм
Число разбиваний
Угол j1,...°
Нижняя граница hвд
Верхняя граница hвд
N0
n0
Таблица Б.9 - Параметры «мертвой» полости с приемно-раздаточным патрубком (ПРП)
Высота hм.п, мм, ПРП под номером
Угол j2,...°, ПРП под номером
Вместимость Vм.п, м3
1
2
3
4
1
2
3
4
1
2
3
4
5
6
7
8
9
Примечание - Графу 9 заполняют только при определении вместимости «мертвой» полости объемным методом и принятие вместимости «мертвой» полости по 5.3.1.5.
дополнить таблицами - Б.9.1, Б.9.2:
Таблица Б.9.1 - Параметры «мертвой» полости с приемно-раздаточным устройством (ПРУ)
Высота установки hу, мм, ПРУ под номером
Расстояние hc, мм, ПРУ под номером
Длина lс, мм, ПРУ под номером
Угол j2,...°, ПРУ под номером
Вместимость
1
2
1
2
1
2
1
2
1
2
3
4
5
6
7
8
9
Примечание - Число граф в зависимости от числа приемно-раздаточных устройств может быть увеличено.
Таблица Б.9.2 - Параметры местных неровностей (хлопунов)
Хлопун
Длина lх
Ширина bх
Высота hх
Таблица Б.10. Графа 1. Заменить значение: 8 на 24;
дополнить примечанием - 3:
«3 При отсутствии центральной трубы вносят (графа 3) значение b0»;
таблицы Б.13, Б.14 изложить в новой редакции:
Таблица Б.13 - Базовая высота резервуара
В миллиметрах
Точка измерения базовой высоты Нб
Номер измерения
1
2
Риска измерительного люка
Верхний срез измерительного люка
Таблица Б.14 - Степень наклона и угол приближенного направления наклона резервуара
Номер точки разбивки k от 1 до т/2
Отсчет по рейке lk, мм
Номер точки разбивки k от (m/2 + l) до т
Отсчет по рейке lk, мм
1
2
3
4
1
l1
m/2 + 1
l(m/2 + 1)
2
l2
m/2 + 2
l(m/2 + 2)
3
l3
m/2 + 3
l(m/2 + 3)
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
m/2
l(m/2)
т
lm
Примечания
1 k (графы 1, 3)- номер разбивки длины окружности первого пояса резервуара, выбирают из ряда: 1, 2, 3,..., т.
2 lk (графы 2, 4) - отсчеты по рейке в точках разбивки k.
дополнить таблицей - Б.14.1:
Таблица Б.14.1 - Степень наклона и угол уточненного направления наклона резервуара
Значение угла n2 при Nп =...
Показание рейки по правой разбивке lп, мм
Значение угла n2 при Nл =...
Показание рейки по правой разбивке lл, мм
l¢п
l²п
l¢л
l²л
1
2
3
4
5
6
-1°
+1°
-2°
+2°
-3°
+3°
-4°
+4°
-5°
+5°
-6°
+6°
-7°
+7°
-8°
+8°
-9°
+9°
-10°
+10°
-11°
+11°
-12°
+12°
-13°
+13°
-14°
+14°
Примечания
1 В графах 1, 4 вносят числа разбивок Nп, Nл (например Nп = 17).
2 l¢п, l²п (графы 2, 3) - показания рейки по правым противоположным разбивкам.
3 l¢л, l²л (графы 5, 6) - показания рейки по левым противоположным разбивкам.
таблицу Б.15 изложить в новой редакции:
Таблица Б.15 - Плавающее покрытие
Масса тп, кг
Диаметр Dп, мм
Расстояние от днища резервуара при крайнем положении, мм
Диаметр отверстия, мм
Параметры опоры
Уровень жидкости в момент всплытия Hвсп, мм
Объем жидкости в момент всплытия Vвсп, м3
нижнем hп
верхнем hп
D1
D2
D3
Диаметр, мм
Число, шт.
Высота, мм
1
2
3
4
5
6
7
8
9
10
11
12
Примечания
1 Если опоры плавающего покрытия приварены к днищу резервуара, то их относят к числу внутренних деталей.
2 Графы 11 и 12 заполняют только при применении объемного метода.
дополнить таблицей - Б.16:
Таблица Б.16 - Высота газового пространства в плавающей крыше
В миллиметрах
Точка измерения высоты газового пространства hгп
Номер измерения
1
2
Риска измерительного люка
Верхний срез измерительного люка
Приложение В. Таблицы В.3, В.5 изложить в новой редакции:
Таблица В.3 - Величины, измеряемые в «мертвой» полости
Высота hм.п, мм, ПРП под номером
Угол j2,...°, ПРП под номером
Отчет по рейке в точке, мм
1
2
3
4
1
2
3
4
касания днища грузом рулетки bл
пересечения 1-го радиуса и 8-й окружности b8.1
Таблица В.5 - Степень наклона и угол приближенного направления наклона резервуара
Номер точки разбивки k от 1 до m/2
Отсчет по рейке lk, мм
Номер точки разбивки k от (m/2 + 1) до т
Отсчет по рейке lk, мм
1
2
3
4
1
l1
m/2 + 1
l(m/2 + l)
2
l2
m/2 + 2
l(m/2 + 2)
3
l3
m/2 + 3
l(m/2 + 3)
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
m/2
l(m/2)
т
lm
Примечания
1 k (графы 1,3)- номер разбивки длины окружности первого пояса резервуара, выбирают из ряда: 1, 2, 3,..., т.
2 lk (графы 2, 4) - отсчеты по рейке в точках разбивки k.
дополнить таблицей - В.5.1
Таблица В.5.1 - Степень наклона и угол уточненного направления наклона резервуара
Значение угла n2 при Nп =...
Показание рейки по правой разбивке lп, мм
Значение угла n2 при Nл =...
Показание рейки по правой разбивке lл, мм
l¢п
l²п
l¢л
l²п
1
2
3
4
5
6
-1°
+1°
-2°
+2°
-3°
+3°
-4°
+4°
-5°
+5°
-6°
+6°
-7°
+7°
-8°
+8°
-9°
+9°
-10°
+10°
-11°
+11°
-12°
+12°
-13°
+13°
-14°
+14°
-15°
+15°
-16°
+16°
Примечания
1 В головках граф 1,4 вносят числа разбивок Nп, Nл (например Nп = 17).
2 l¢п, l"п (графы 2, 3) - показания рейки по правым противоположным разбивкам.
3 l¢л, l"л (графы 5, 6) - показания рейки по левым противоположным разбивкам.
таблицу В.6 изложить в новой редакции:
Таблица В.6 - Текущие значения параметров поверочной жидкости
Номер измерения
Объем дозы (DVc)j, дм3, или показание счетчика жидкости qj, дм3 (Nj, имп.)
Уровень Hj, мм
Температура жидкости, °С
Избыточное давление в счетчике жидкости pj, МПа
Расход Q, дм3/мин, (дм3/имп.)
в резервуаре (Tp)j
в счетчике жидкости (Tт)j
1
2
3
4
5
6
7
1
2
3*
4
5*
...
...
...
* Номера измерений, выделяемые только для счетчиков жидкости с проскоком и только при применении статического метода измерений объема дозы жидкости.
дополнить таблицей - В.9.1:
Таблица В.9.1 - Параметры счетчика жидкости со сдвигом дозирования и проскоком
Наименование параметра
Значение параметра при расходе Q, дм3/мин
100
150
200
250
Сдвиг дозирования С, дм3
Проскок Пр, дм3
Приложение Г. Пункт Г.1.2. Формулу (Г.2) изложить в новой редакции:
«Lвн = Lн - 2p(d1 + dс.к + dс.п), (Г.2)»;
экспликацию дополнить абзацем:
«dс.п - толщина слоя антикоррозийного покрытия».
Пункт Г.1.3 дополнить подпунктами - Г.1.3.1 - Г.1.3.4:
«Г.1.3.1 За значение длины внутренней окружности второго пояса
резервуара с плавающей крышей (L*вн.ц)2п при высоте поясов, равной 1500 мм, принимают значение длины внутренней окружности первого пояса (L*вн.ц)1п, определяемое по формуле
(Lвн.ц)1f = Lн - 2p(d1 + dс.к + dс.п). (Г.2а)
Г.1.3.2 Длину внутренней окружности второго пояса резервуара с плавающей крышей при высоте поясов от 2250 до 3000 мм (L**вн.ц)2п или длину внутренней окружности третьего пояса при высоте поясов 1500 мм (L*вн.ц)3п определяют методом последовательных приближений, используя результаты отложений хорды S1 на уровне 1600 мм или на уровне 1200 мм по 9.1.12.2 настоящего стандарта в следующей последовательности:
а) в качестве первого приближения внутреннего диаметра пояса принимают значение внутреннего диаметра первого пояса, определенного по формуле (3и);
б) вычисляют центральный угол aх1, соответствующий остаточной хорде S0п (например для второго пояса), по формуле

где S0п - длина остаточной хорды, измеренной по 9.1.12.7;
D21 - внутренний диаметр второго пояса в первом приближении, значение которого принимают равным значению внутреннего диаметра первого пояса, определенного по формуле (3и);
в) вычисляют разность углов bх1 по формуле
bх1 = a1т1 + aх1 - 360°,
где a1 - центральный угол, вычисленный по формуле (3к) при числе отложений хорды т1 и принимаемый за значение первого приближения центрального угла;
г) вычисляют центральный угол a2 во втором приближении по формуле
 (Г.2б)
(Г.2б)Если bх1 < 0, то в формуле (Г.2б) принимают знак «+», если bх1 > 0 - знак «-»;
д) вычисляют внутренний диаметр второго пояса D22 во втором приближении по формуле

где S1 - хорда, длину которой вычисляют по формуле (3ж);
е) проверяют выполнение условия
Если это условие не выполняется, то определяют значение внутреннего диаметра второго пояса D32 в третьем приближении, вычисляя последовательно параметры по формулам:

bх2 = a2т1 + aх2 - 360°,

Проверяют выполнение условия
Если это условие не выполняется, то делают следующие приближения до выполнения условия
Выполняя аналогичные операции, указанные в перечислениях а) - е), определяют внутренний диаметр третьего пояса резервуара.
Г.1.3.3 Длины внутренних окружностей второго (L*вн.ц)2п и третьего (L**вн.ц)3п поясов резервуара с плавающей крышей вычисляют по формулам:


где D2, D3 - внутренние диаметры второго и третьего поясов, определенные методом последовательного приближения по Г.1.3.2.
Г.1.3.4 Длины внутренних окружностей вышестоящих поясов резервуара с плавающей крышей
 вычисляют по формуле
вычисляют по формуле (Г.10а)
(Г.10а)где
 - длина внутренней окружности первого пояса, вычисляемая по формуле (Г.2а);
- длина внутренней окружности первого пояса, вычисляемая по формуле (Г.2а);DRcpi - средние радиальные отклонения образующих резервуара, вычисляемые по формуле (Г.9);
i - номер пояса, выбираемый для резервуаров:
- при высоте поясов от 2250 до 3000 мм из ряда: 2, 3,..., n;
- при высоте поясов 1500 мм из ряда: 3, 4,..., n;
n - число поясов резервуара».
Подпункт Г.2.1.2, пункт Г.2.2. Формулу (Г.9) изложить в новой редакции:
«DRcpi = аср.i - аср1 (Г.9)»;
формула (Г.10). Заменить обозначение: DRc.pi на DRcpi.
Пункт Г.2.5. Формулу (Г.12) изложить в новой редакции:
«hi = hнi - Sihнхi + Si+1hнx(i+1), (Г.12)»;
экспликацию дополнить абзацами:
«Si, Si+1 - величины, имеющие абсолютное значение, равное 1, и в зависимости от схемы нахлеста поясов в соответствии с таблицей Б.6 (графа 6) принимают знак «+» или «-»;
hнx(i+1) - нахлеста (i + 1)-го вышестоящего пояса».
Пункт Г.3. Наименование изложить в новой редакции:
Источник: 1:
Англо-русский словарь нормативно-технической терминологии > III
-
9 SCADA
SCADA
SCADA-система
диспетчерское управление и сбор данных
ПО, предназначенное для поддержки средств автоматизации и построения систем промышленной автоматизации.
[ http://www.morepc.ru/dict/]SCADA (аббр. от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) — программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления. SCADA может являться частью АСУ ТП, АСКУЭ, системы экологического мониторинга, научного эксперимента, автоматизации здания и т. д. SCADA-системы используются во всех отраслях хозяйства, где требуется обеспечивать операторский контроль за технологическими процессами в реальном времени. Данное программное обеспечение устанавливается на компьютеры и, для связи с объектом, использует драйверы ввода-вывода или OPC/DDE серверы. Программный код может быть как написан на языке программирования (например на C++), так и сгенерирован в среде проектирования.
Иногда SCADA-системы комплектуются дополнительным ПО для программирования промышленных контроллеров. Такие SCADA-системы называются интегрированными и к ним добавляют термин SoftLogic.
Термин «SCADA» имеет двоякое толкование. Наиболее широко распространено понимание SCADA как приложения[2], то есть программного комплекса, обеспечивающего выполнение указанных функций, а также инструментальных средств для разработки этого программного обеспечения. Однако, часто под SCADA-системой подразумевают программно-аппаратный комплекс. Подобное понимание термина SCADA более характерно для раздела телеметрия.
Значение термина SCADA претерпело изменения вместе с развитием технологий автоматизации и управления технологическими процессами. В 80-е годы под SCADA-системами чаще понимали программно-аппаратные комплексы сбора данных реального времени. С 90-х годов термин SCADA больше используется для обозначения только программной части человеко-машинного интерфейса АСУ ТП.Основные задачи, решаемые SCADA-системами
SCADA-системы решают следующие задачи:- Обмен данными с «устройствами связи с объектом», то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
- Обработка информации в реальном времени.
- Логическое управление.
- Отображение информации на экране монитора в удобной и понятной для человека форме.
- Ведение базы данных реального времени с технологической информацией.
- Аварийная сигнализация и управление тревожными сообщениями.
- Подготовка и генерирование отчетов о ходе технологического процесса.
- Осуществление сетевого взаимодействия между SCADA ПК.
- Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
SCADA-системы позволяют разрабатывать АСУ ТП в клиент-серверной или в распределённой архитектуре.
Основные компоненты SCADA
SCADA—система обычно содержит следующие подсистемы:- Драйверы или серверы ввода-вывода — программы, обеспечивающие связь SCADA с промышленными контроллерами, счётчиками, АЦП и другими устройствами ввода-вывода информации.
- Система реального времени — программа, обеспечивающая обработку данных в пределах заданного временного цикла с учетом приоритетов.
- Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) — инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им. Программа-редактор для разработки человеко-машинного интерфейса.
- Система логического управления — программа, обеспечивающая исполнение пользовательских программ (скриптов) логического управления в SCADA-системе. Набор редакторов для их разработки.
- База данных реального времени — программа, обеспечивающая сохранение истории процесса в режиме реального времени.
- Система управления тревогами — программа, обеспечивающая автоматический контроль технологических событий, отнесение их к категории нормальных, предупреждающих или аварийных, а также обработку событий оператором или компьютером.
- Генератор отчетов — программа, обеспечивающая создание пользовательских отчетов о технологических событиях. Набор редакторов для их разработки.
- Внешние интерфейсы — стандартные интерфейсы обмена данными между SCADA и другими приложениями. Обычно OPC, DDE, ODBC, DLL и т. д.
Концепции систем
Термин SCADA обычно относится к централизованным системам контроля и управления всей системой, или комплексами систем, осуществляемого с участием человека. Большинство управляющих воздействий выполняется автоматически RTU или ПЛК. Непосредственное управление процессом обычно обеспечивается RTU или PLC, а SCADA управляет режимами работы. Например, PLC может управлять потоком охлаждающей воды внутри части производственного процесса, а SCADA система может позволить операторам изменять уста для потока, менять маршруты движения жидкости, заполнять те или иные ёмкости, а также следить за тревожными сообщениями (алармами), такими как — потеря потока и высокая температура, которые должны быть отображены, записаны, и на которые оператор должен своевременно реагировать. Цикл управления с обратной связью проходит через RTU или ПЛК, в то время как SCADA система контролирует полное выполнение цикла.
Сбор данных начинается в RTU или на уровне PLC и включает — показания измерительного прибора. Далее данные собираются и форматируются таким способом, чтобы оператор диспетчерской, используя HMI мог принять контролирующие решения — корректировать или прервать стандартное управление средствами RTU/ПЛК. Данные могут также быть записаны в архив для построения трендов и другой аналитической обработки накопленных данных.[ http://ru.wikipedia.org/wiki/SCADA]
CitectSCADA
полнофункциональная система мониторинга, управления и сбора данных (SCADA – Supervisory Control And Data Acquisition)
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ:CitectSCADA построена на базе мультизадачного ядра реального времени, что обеспечивает производительность сбора до 5 000 значений в секунду при работе в сетевом режиме с несколькими станциями. Модульная клиент-серверная архитектура позволяет одинаково эффективно применять CitectSCADA как в малых проектах, с использованием только одного АРМ, так и в больших, с распределением задач на несколько компьютеров.
В отличие от других SCADA-систем среда разработки CitectSCADA поставляется бесплатно. Оплачивается только среда исполнения (runtime). Это позволяет пользователю разработать и протестировать пробный проект, не вкладывая средств на начальном этапе.
Схема лицензирования CitectSCADA основана на учете числа одновременно задействованных компьютеров в проекте, а не общего числа компьютеров, на которых установлена CitectSCADA.
CitectSCADA лицензируется на заданное количество точек (дискретных или аналоговых переменных). При этом учитываются только внешние переменные, считываемые из устройств ввода/вывода, а внутренние переменные, находящиеся в памяти или на диске, бесплатны и не входят в количество лицензируемых точек. Градация количества лицензируемых точек в CitectSCADA более равномерна, чем в других системах: 75, 150, 500, 1 500, 5 000, 15 000, 50 000 и неограниченное количество.
В CitectSCADA резервирование является встроенным и легко конфигурируемым. Резервирование позволяет защищать все зоны потенциальных отказов как функциональных модулей (серверов и клиентов), так и сетевых соединений между узлами и устройствами ввода/вывода.
CitectSCADA имеет встроенный язык программирования CiCode, а также поддержку VBA.
CitectSCADA работает как 32-разрядное приложение Windows 9X/NT/2000/XP/2003. Сбор данных, формирование алармов и построение трендов происходит одновременно с редактированием и компиляцией.
[ http://www.rtsoft.ru/catalog/soft/scada/detail/343/]
Словесный портрет современной управляющей системы типа SCADA
-
Масштабируемая
- Наращивание системы без её переконфигурирования
- Масштабы проекта не ограничены
- До 255 одновременно подключённых клиентов
- Поддержка локальных и глобальных сетей
- Возможность интеграции с веб-приложениями без конфигурирования системы
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка кластерных конфигураций
- Возможность перезапуска отдельных процессов, относящихся к разным компонентам
-
Гибкая
- Полноценная архитектура «клиент-сервер»
- Возможность масштабирования серверов/серверных массивов алармов, трендов и отчётов
- Поддержка централизованного хранения файлов проекта для удобства обслуживания, а также распределённого хранения и комбинированного варианта
- Внесение изменений на отдельных локациях
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка устоявшихся и новых стандартов
-
Надёжная
- Встроенная поддержка режима ожидания
- Резервирование файловых серверов
- Резервирование сетевых коммуникаций
- Резервирование серверов алармов
- Резервирование серверов трендов
- Резервирование серверов отчётов
- Многоуровневое резервирование ввода-вывода
- Автоматическая замена серверов
- Автоматическая синхронизация историй трендов
- Автоматическая синхронизация таблиц алармов
- Автоматическая синхронизация времени
- Защитные функции
- Автоматический перезапуск в случае сбоя системы
- Высокопроизводительная
- Безопасная
-
Коммуникационные технологии
- Поддержка открытых коммуникационных стандартов
- Поддержка каждым сервером ввода-вывода многих протоколов
- Драйверы протоколов RS-232, RS-422, RS-485, TCP/IP
- Время установки драйверов в пределах 60 секунд
- До 255 одновременно подключённых клиентов
- До 4096 устройств ввода-вывода на одну систему
- Поддержка внешнего подключения для удалённых устройств
- Средства разработки драйверов для специализированных протоколов
- Поддержка стандарта OPC Server DA2.0
- Интегрированный веб-сервис XML
- Доступ
- Неограниченное число меток
- Длина имени метки до 80 символов
- Поддержка меток качества и времени для соответствующих драйверов
- Единая база данных для контроллеров ПЛК и системы SCADA
- Двунаправленная синхронизация со средой разработки для ПЛК
- Статическая синхронизация для разработки в автономном режиме
- - Автоматические импорт и синхронизация
- Импорт из ПЛК разных типов
- Добавление пользовательских схем импорта
-
Разработка
- Неограниченное число экранов
- 24-битные цвета
- Быстрый выбор цветов по названиям
- Поддержка прозрачных цветов
- Продвинутая анимация без дополнительного программирования
- Анимация символов на базе тегов
- До 32000 анимированных изображений на страницу
- Неограниченное число мигающих цветов
- Мультиязычность
- Инструменты типа 3D Pipe
- Трёхмерные эффекты (поднятие, опускание, выдавливание)
-
Импорт графики
- Растровые изображения Windows (BMP, RLE, DIB)
- Формат AutoCAD (DXF)
- Формат Encapsulated Postscript (EPS)
- Формат Fax Image (FAX)
- Формат Ventura (IMG)
- Формат JPEG (JPG, JIF, JFF, JFE)
- Формат Photo CD (PCD)
- Формат PaintBrush (PCX)
- Формат Portable Network Graphics (PNG)
- Формат Targa (TGA)
- Формат Tagged Image Format (TIFF)
- Формат Windows Meta File (WMF)
- Формат Word Perfect Graphics (WPG)
- Неограниченное число отмен действий
- Кнопки в стиле Windows XP со свойствами динамического перемещения
- Шаблоны
- Символы
- Более 800 символов в комплекте поставки
-
Объектное конфигурирование
- Неограниченное число объектов типа «джинн» (Genie) и «суперджинн» (Super Genie)
- Пользовательские «джинны» позволяют отображать на экране пользовательское оборудование
- Пользовательские «суперджины» позволяют работать с разными устройствами через один интерфейс
- Объекты типа «джинн» и «суперджинн» способны воспринимать изменения в тегах устройств без дополнительного программирования
-
Работа
- Разрешения до 4096 x 4096
- Изменение размеров изображений (изотропное и анизотропное)
- Поддержка вывода на несколько мониторов
- Настройка скорости обновления страниц (минимум 10 мс)
- Информирование о потере связи
- Переключение языков в ходе работы
- Поддержка одно- и двухбайтовых наборов символов
-
Безопасность
- Уровень безопасности влияет на:
- Видимость объектов
- Доступ к графическим дисплеям
- Подтверждение алармов
- Создание отчётов
- Системные утилиты
-
Управление
- Сенсорные команды
- Мышь
- -Клавиатурное управление системой, страницами и анимацией
- Вертикальные и горизонтальные ползунки
- Замена БД
-
Анализ процессов
- Объединение алармов с трендами
- 32 и более перьев
- 4 и более оконных секций
- 2 и более курсоров
- Наложение перьев
- Информация о качестве данных
- Аналоговые и цифровые перья
- Информация о подтверждении алармов
- Описание алармов (аналоговых и мультицифровых)
- Комментарии к алармам
- Поддержка перехода на летнее и зимнее время
- Сохранение просмотров в процессе работы
- Хранение просмотров в удалённых локациях
- Отображение различных временных периодов на том же дисплее
- Настраиваемое и расширяемое управление
-
Алармы
- Неограниченное число алармов
- Централизованная обработка алармов
- Алармы могут быть следующих типов:
- Цифровые
- Аналоговые
- Временные метки
- Высокоуровневые выражения
- Мультицифровые
- Цифровые с временными метками
- Аналоговые с временными метками
- Изменение языка для всех алармов в процессе работы
- Подтверждение приёма в сети без дополнительного конфигурирования
- Отключение сети без дополнительного конфигурирования
- Категории, зоны и приоритеты алармов
- Задержки алармов
- Назначение временных меток с разрешением в 1 мс
- Различные данные в алармах
- Индивидуальные и групповые подтверждения
- Подтверждения на основе категорий и приоритетов
- Подтверждения отображаются графически, в списке алармов или через специализированный код:
- Сортировка алармов
- Фильтрация алармов
- Пользовательские поля алармов
-
Тренды
- Неограниченное число трендов
- До 16000 трендов на страницу
- Отображение любого тренда из истории менее чем за 1 секунду
- Файлов трендов регулируемых размеров
- Просмотр архивных трендов параллельно с актуальными в процессе работы системы
- Выбор с разрешением 1 мс
- Сравнение трендов
- Быстрый выбор трендов по тегам
- Сохранение по событию или периодическое сохранение
Статистический контроль ( SPC)
- Таблицы индексов Cp и CpK
- Контрольные карты X, R и S
- Диаграммы Парето
- Настраиваемые размеры и границы подгрупп
- Типы алармов: Above UCL, Below LCL, Outside CL, Down Trend, Up Trend, Erratic, Gradual, Down, Gradual Up, Mixture, Outside WL, Freak, Stratification и высокоуровневые выражения
- Редактор сгенерированных отчётов, редактирование по модели WYSIWYN, отчёты в формате Rich Text
- Запуск внешними событиями, по расписанию, через высокоуровневые выражения и по команде оператора
- Вывод на принтер, в файл, по электронной почте, на экран, в формат HTML
- Разработка проекта
- Масштабы проекта не ограничены
- Возможность разбиения на несколько проектов
- Удобная стандартизация проектов
- Удобное обслуживание проектов
- Встроенное средство настройки компьютеров позволяет конфигурировать каждый подключённый к сети ПК по отдельности
- Истинная вытесняющая многозадачность
- До 512 параллельных потоков
- Доступно более 600 функций SCADA
- Библиотеки для пользовательских функций
- До 2700 пользовательских функций
- Локальные, модульные и глобальные переменные
- Дополнительное программное обеспечение для создания собственных функций не требуется
- Прямой доступ к данным трендов, отчётов и алармов
- Подсвечивание синтаксиса
- Система онлайн-подсказок
- Всплывающие подсказки
- При редактировании доступны:
- Контрольные точки
- Просмотр переменных
- Мониторинг нитей
- Выделение кода цветом
- Окно контрольных точек
- Пошаговый режим выполнения
- Выделение текущей строки
- Удалённая отладка
- Автоматическая отладка в случае ошибок
- Сервер и клиент OPC
- Интерфейс ODBC
- Интерфейс OLE-DB
- Интерфейс CTAPI
- Интерфейс DLL
- Интерфейс MAPI (MAIL)
- Протоколы TCP/IP
- Последовательный интерфейс
[ http://www.rtsoft-training.ru/?p=600074]
Тематики
Синонимы
- SCADA-система
- диспетчерское управление и сбор данных
- система диспетчерского управления и сбора данных
- система мониторинга, управления и сбора данных
EN
Русско-английский словарь нормативно-технической терминологии > SCADA
-
10 SCADA
диспетчерское управление и сбор данных
Подсистема сбора, хранения и обработки телеметрической информации, поступающей от удаленных датчиков, осуществляющих измерение температуры, давления, расхода электроэнергии и др. Сбор данных осуществляется с помощью контроллеров, программное обеспечение которых позволяет реализовать практически любой алгоритм опроса датчиков, а также обеспечить первичную обработку информации. Обмен данными часто осуществляется через интерфейс RS-485. Термин SCADA обычно употребляют, когда речь идет о контроле и регулировании каких-либо производственных процессов.
[Л.М. Невдяев. Телекоммуникационные технологии. Англо-русский толковый словарь-справочник. Под редакцией Ю.М. Горностаева. Москва, 2002]Тематики
- электросвязь, основные понятия
EN
SCADA
SCADA-система
диспетчерское управление и сбор данных
ПО, предназначенное для поддержки средств автоматизации и построения систем промышленной автоматизации.
[ http://www.morepc.ru/dict/]SCADA (аббр. от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) — программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления. SCADA может являться частью АСУ ТП, АСКУЭ, системы экологического мониторинга, научного эксперимента, автоматизации здания и т. д. SCADA-системы используются во всех отраслях хозяйства, где требуется обеспечивать операторский контроль за технологическими процессами в реальном времени. Данное программное обеспечение устанавливается на компьютеры и, для связи с объектом, использует драйверы ввода-вывода или OPC/DDE серверы. Программный код может быть как написан на языке программирования (например на C++), так и сгенерирован в среде проектирования.
Иногда SCADA-системы комплектуются дополнительным ПО для программирования промышленных контроллеров. Такие SCADA-системы называются интегрированными и к ним добавляют термин SoftLogic.
Термин «SCADA» имеет двоякое толкование. Наиболее широко распространено понимание SCADA как приложения[2], то есть программного комплекса, обеспечивающего выполнение указанных функций, а также инструментальных средств для разработки этого программного обеспечения. Однако, часто под SCADA-системой подразумевают программно-аппаратный комплекс. Подобное понимание термина SCADA более характерно для раздела телеметрия.
Значение термина SCADA претерпело изменения вместе с развитием технологий автоматизации и управления технологическими процессами. В 80-е годы под SCADA-системами чаще понимали программно-аппаратные комплексы сбора данных реального времени. С 90-х годов термин SCADA больше используется для обозначения только программной части человеко-машинного интерфейса АСУ ТП.Основные задачи, решаемые SCADA-системами
SCADA-системы решают следующие задачи:- Обмен данными с «устройствами связи с объектом», то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
- Обработка информации в реальном времени.
- Логическое управление.
- Отображение информации на экране монитора в удобной и понятной для человека форме.
- Ведение базы данных реального времени с технологической информацией.
- Аварийная сигнализация и управление тревожными сообщениями.
- Подготовка и генерирование отчетов о ходе технологического процесса.
- Осуществление сетевого взаимодействия между SCADA ПК.
- Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
SCADA-системы позволяют разрабатывать АСУ ТП в клиент-серверной или в распределённой архитектуре.
Основные компоненты SCADA
SCADA—система обычно содержит следующие подсистемы:- Драйверы или серверы ввода-вывода — программы, обеспечивающие связь SCADA с промышленными контроллерами, счётчиками, АЦП и другими устройствами ввода-вывода информации.
- Система реального времени — программа, обеспечивающая обработку данных в пределах заданного временного цикла с учетом приоритетов.
- Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) — инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им. Программа-редактор для разработки человеко-машинного интерфейса.
- Система логического управления — программа, обеспечивающая исполнение пользовательских программ (скриптов) логического управления в SCADA-системе. Набор редакторов для их разработки.
- База данных реального времени — программа, обеспечивающая сохранение истории процесса в режиме реального времени.
- Система управления тревогами — программа, обеспечивающая автоматический контроль технологических событий, отнесение их к категории нормальных, предупреждающих или аварийных, а также обработку событий оператором или компьютером.
- Генератор отчетов — программа, обеспечивающая создание пользовательских отчетов о технологических событиях. Набор редакторов для их разработки.
- Внешние интерфейсы — стандартные интерфейсы обмена данными между SCADA и другими приложениями. Обычно OPC, DDE, ODBC, DLL и т. д.
Концепции систем
Термин SCADA обычно относится к централизованным системам контроля и управления всей системой, или комплексами систем, осуществляемого с участием человека. Большинство управляющих воздействий выполняется автоматически RTU или ПЛК. Непосредственное управление процессом обычно обеспечивается RTU или PLC, а SCADA управляет режимами работы. Например, PLC может управлять потоком охлаждающей воды внутри части производственного процесса, а SCADA система может позволить операторам изменять уста для потока, менять маршруты движения жидкости, заполнять те или иные ёмкости, а также следить за тревожными сообщениями (алармами), такими как — потеря потока и высокая температура, которые должны быть отображены, записаны, и на которые оператор должен своевременно реагировать. Цикл управления с обратной связью проходит через RTU или ПЛК, в то время как SCADA система контролирует полное выполнение цикла.
Сбор данных начинается в RTU или на уровне PLC и включает — показания измерительного прибора. Далее данные собираются и форматируются таким способом, чтобы оператор диспетчерской, используя HMI мог принять контролирующие решения — корректировать или прервать стандартное управление средствами RTU/ПЛК. Данные могут также быть записаны в архив для построения трендов и другой аналитической обработки накопленных данных.[ http://ru.wikipedia.org/wiki/SCADA]
CitectSCADA
полнофункциональная система мониторинга, управления и сбора данных (SCADA – Supervisory Control And Data Acquisition)
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ:CitectSCADA построена на базе мультизадачного ядра реального времени, что обеспечивает производительность сбора до 5 000 значений в секунду при работе в сетевом режиме с несколькими станциями. Модульная клиент-серверная архитектура позволяет одинаково эффективно применять CitectSCADA как в малых проектах, с использованием только одного АРМ, так и в больших, с распределением задач на несколько компьютеров.
В отличие от других SCADA-систем среда разработки CitectSCADA поставляется бесплатно. Оплачивается только среда исполнения (runtime). Это позволяет пользователю разработать и протестировать пробный проект, не вкладывая средств на начальном этапе.
Схема лицензирования CitectSCADA основана на учете числа одновременно задействованных компьютеров в проекте, а не общего числа компьютеров, на которых установлена CitectSCADA.
CitectSCADA лицензируется на заданное количество точек (дискретных или аналоговых переменных). При этом учитываются только внешние переменные, считываемые из устройств ввода/вывода, а внутренние переменные, находящиеся в памяти или на диске, бесплатны и не входят в количество лицензируемых точек. Градация количества лицензируемых точек в CitectSCADA более равномерна, чем в других системах: 75, 150, 500, 1 500, 5 000, 15 000, 50 000 и неограниченное количество.
В CitectSCADA резервирование является встроенным и легко конфигурируемым. Резервирование позволяет защищать все зоны потенциальных отказов как функциональных модулей (серверов и клиентов), так и сетевых соединений между узлами и устройствами ввода/вывода.
CitectSCADA имеет встроенный язык программирования CiCode, а также поддержку VBA.
CitectSCADA работает как 32-разрядное приложение Windows 9X/NT/2000/XP/2003. Сбор данных, формирование алармов и построение трендов происходит одновременно с редактированием и компиляцией.
[ http://www.rtsoft.ru/catalog/soft/scada/detail/343/]
Словесный портрет современной управляющей системы типа SCADA
-
Масштабируемая
- Наращивание системы без её переконфигурирования
- Масштабы проекта не ограничены
- До 255 одновременно подключённых клиентов
- Поддержка локальных и глобальных сетей
- Возможность интеграции с веб-приложениями без конфигурирования системы
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка кластерных конфигураций
- Возможность перезапуска отдельных процессов, относящихся к разным компонентам
-
Гибкая
- Полноценная архитектура «клиент-сервер»
- Возможность масштабирования серверов/серверных массивов алармов, трендов и отчётов
- Поддержка централизованного хранения файлов проекта для удобства обслуживания, а также распределённого хранения и комбинированного варианта
- Внесение изменений на отдельных локациях
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка устоявшихся и новых стандартов
-
Надёжная
- Встроенная поддержка режима ожидания
- Резервирование файловых серверов
- Резервирование сетевых коммуникаций
- Резервирование серверов алармов
- Резервирование серверов трендов
- Резервирование серверов отчётов
- Многоуровневое резервирование ввода-вывода
- Автоматическая замена серверов
- Автоматическая синхронизация историй трендов
- Автоматическая синхронизация таблиц алармов
- Автоматическая синхронизация времени
- Защитные функции
- Автоматический перезапуск в случае сбоя системы
- Высокопроизводительная
- Безопасная
-
Коммуникационные технологии
- Поддержка открытых коммуникационных стандартов
- Поддержка каждым сервером ввода-вывода многих протоколов
- Драйверы протоколов RS-232, RS-422, RS-485, TCP/IP
- Время установки драйверов в пределах 60 секунд
- До 255 одновременно подключённых клиентов
- До 4096 устройств ввода-вывода на одну систему
- Поддержка внешнего подключения для удалённых устройств
- Средства разработки драйверов для специализированных протоколов
- Поддержка стандарта OPC Server DA2.0
- Интегрированный веб-сервис XML
- Доступ
- Неограниченное число меток
- Длина имени метки до 80 символов
- Поддержка меток качества и времени для соответствующих драйверов
- Единая база данных для контроллеров ПЛК и системы SCADA
- Двунаправленная синхронизация со средой разработки для ПЛК
- Статическая синхронизация для разработки в автономном режиме
- - Автоматические импорт и синхронизация
- Импорт из ПЛК разных типов
- Добавление пользовательских схем импорта
-
Разработка
- Неограниченное число экранов
- 24-битные цвета
- Быстрый выбор цветов по названиям
- Поддержка прозрачных цветов
- Продвинутая анимация без дополнительного программирования
- Анимация символов на базе тегов
- До 32000 анимированных изображений на страницу
- Неограниченное число мигающих цветов
- Мультиязычность
- Инструменты типа 3D Pipe
- Трёхмерные эффекты (поднятие, опускание, выдавливание)
-
Импорт графики
- Растровые изображения Windows (BMP, RLE, DIB)
- Формат AutoCAD (DXF)
- Формат Encapsulated Postscript (EPS)
- Формат Fax Image (FAX)
- Формат Ventura (IMG)
- Формат JPEG (JPG, JIF, JFF, JFE)
- Формат Photo CD (PCD)
- Формат PaintBrush (PCX)
- Формат Portable Network Graphics (PNG)
- Формат Targa (TGA)
- Формат Tagged Image Format (TIFF)
- Формат Windows Meta File (WMF)
- Формат Word Perfect Graphics (WPG)
- Неограниченное число отмен действий
- Кнопки в стиле Windows XP со свойствами динамического перемещения
- Шаблоны
- Символы
- Более 800 символов в комплекте поставки
-
Объектное конфигурирование
- Неограниченное число объектов типа «джинн» (Genie) и «суперджинн» (Super Genie)
- Пользовательские «джинны» позволяют отображать на экране пользовательское оборудование
- Пользовательские «суперджины» позволяют работать с разными устройствами через один интерфейс
- Объекты типа «джинн» и «суперджинн» способны воспринимать изменения в тегах устройств без дополнительного программирования
-
Работа
- Разрешения до 4096 x 4096
- Изменение размеров изображений (изотропное и анизотропное)
- Поддержка вывода на несколько мониторов
- Настройка скорости обновления страниц (минимум 10 мс)
- Информирование о потере связи
- Переключение языков в ходе работы
- Поддержка одно- и двухбайтовых наборов символов
-
Безопасность
- Уровень безопасности влияет на:
- Видимость объектов
- Доступ к графическим дисплеям
- Подтверждение алармов
- Создание отчётов
- Системные утилиты
-
Управление
- Сенсорные команды
- Мышь
- -Клавиатурное управление системой, страницами и анимацией
- Вертикальные и горизонтальные ползунки
- Замена БД
-
Анализ процессов
- Объединение алармов с трендами
- 32 и более перьев
- 4 и более оконных секций
- 2 и более курсоров
- Наложение перьев
- Информация о качестве данных
- Аналоговые и цифровые перья
- Информация о подтверждении алармов
- Описание алармов (аналоговых и мультицифровых)
- Комментарии к алармам
- Поддержка перехода на летнее и зимнее время
- Сохранение просмотров в процессе работы
- Хранение просмотров в удалённых локациях
- Отображение различных временных периодов на том же дисплее
- Настраиваемое и расширяемое управление
-
Алармы
- Неограниченное число алармов
- Централизованная обработка алармов
- Алармы могут быть следующих типов:
- Цифровые
- Аналоговые
- Временные метки
- Высокоуровневые выражения
- Мультицифровые
- Цифровые с временными метками
- Аналоговые с временными метками
- Изменение языка для всех алармов в процессе работы
- Подтверждение приёма в сети без дополнительного конфигурирования
- Отключение сети без дополнительного конфигурирования
- Категории, зоны и приоритеты алармов
- Задержки алармов
- Назначение временных меток с разрешением в 1 мс
- Различные данные в алармах
- Индивидуальные и групповые подтверждения
- Подтверждения на основе категорий и приоритетов
- Подтверждения отображаются графически, в списке алармов или через специализированный код:
- Сортировка алармов
- Фильтрация алармов
- Пользовательские поля алармов
-
Тренды
- Неограниченное число трендов
- До 16000 трендов на страницу
- Отображение любого тренда из истории менее чем за 1 секунду
- Файлов трендов регулируемых размеров
- Просмотр архивных трендов параллельно с актуальными в процессе работы системы
- Выбор с разрешением 1 мс
- Сравнение трендов
- Быстрый выбор трендов по тегам
- Сохранение по событию или периодическое сохранение
Статистический контроль ( SPC)
- Таблицы индексов Cp и CpK
- Контрольные карты X, R и S
- Диаграммы Парето
- Настраиваемые размеры и границы подгрупп
- Типы алармов: Above UCL, Below LCL, Outside CL, Down Trend, Up Trend, Erratic, Gradual, Down, Gradual Up, Mixture, Outside WL, Freak, Stratification и высокоуровневые выражения
- Редактор сгенерированных отчётов, редактирование по модели WYSIWYN, отчёты в формате Rich Text
- Запуск внешними событиями, по расписанию, через высокоуровневые выражения и по команде оператора
- Вывод на принтер, в файл, по электронной почте, на экран, в формат HTML
- Разработка проекта
- Масштабы проекта не ограничены
- Возможность разбиения на несколько проектов
- Удобная стандартизация проектов
- Удобное обслуживание проектов
- Встроенное средство настройки компьютеров позволяет конфигурировать каждый подключённый к сети ПК по отдельности
- Истинная вытесняющая многозадачность
- До 512 параллельных потоков
- Доступно более 600 функций SCADA
- Библиотеки для пользовательских функций
- До 2700 пользовательских функций
- Локальные, модульные и глобальные переменные
- Дополнительное программное обеспечение для создания собственных функций не требуется
- Прямой доступ к данным трендов, отчётов и алармов
- Подсвечивание синтаксиса
- Система онлайн-подсказок
- Всплывающие подсказки
- При редактировании доступны:
- Контрольные точки
- Просмотр переменных
- Мониторинг нитей
- Выделение кода цветом
- Окно контрольных точек
- Пошаговый режим выполнения
- Выделение текущей строки
- Удалённая отладка
- Автоматическая отладка в случае ошибок
- Сервер и клиент OPC
- Интерфейс ODBC
- Интерфейс OLE-DB
- Интерфейс CTAPI
- Интерфейс DLL
- Интерфейс MAPI (MAIL)
- Протоколы TCP/IP
- Последовательный интерфейс
[ http://www.rtsoft-training.ru/?p=600074]
Тематики
Синонимы
- SCADA-система
- диспетчерское управление и сбор данных
- система диспетчерского управления и сбора данных
- система мониторинга, управления и сбора данных
EN
Англо-русский словарь нормативно-технической терминологии > SCADA
-
11 SCADA system
SCADA
SCADA-система
диспетчерское управление и сбор данных
ПО, предназначенное для поддержки средств автоматизации и построения систем промышленной автоматизации.
[ http://www.morepc.ru/dict/]SCADA (аббр. от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) — программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления. SCADA может являться частью АСУ ТП, АСКУЭ, системы экологического мониторинга, научного эксперимента, автоматизации здания и т. д. SCADA-системы используются во всех отраслях хозяйства, где требуется обеспечивать операторский контроль за технологическими процессами в реальном времени. Данное программное обеспечение устанавливается на компьютеры и, для связи с объектом, использует драйверы ввода-вывода или OPC/DDE серверы. Программный код может быть как написан на языке программирования (например на C++), так и сгенерирован в среде проектирования.
Иногда SCADA-системы комплектуются дополнительным ПО для программирования промышленных контроллеров. Такие SCADA-системы называются интегрированными и к ним добавляют термин SoftLogic.
Термин «SCADA» имеет двоякое толкование. Наиболее широко распространено понимание SCADA как приложения[2], то есть программного комплекса, обеспечивающего выполнение указанных функций, а также инструментальных средств для разработки этого программного обеспечения. Однако, часто под SCADA-системой подразумевают программно-аппаратный комплекс. Подобное понимание термина SCADA более характерно для раздела телеметрия.
Значение термина SCADA претерпело изменения вместе с развитием технологий автоматизации и управления технологическими процессами. В 80-е годы под SCADA-системами чаще понимали программно-аппаратные комплексы сбора данных реального времени. С 90-х годов термин SCADA больше используется для обозначения только программной части человеко-машинного интерфейса АСУ ТП.Основные задачи, решаемые SCADA-системами
SCADA-системы решают следующие задачи:- Обмен данными с «устройствами связи с объектом», то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
- Обработка информации в реальном времени.
- Логическое управление.
- Отображение информации на экране монитора в удобной и понятной для человека форме.
- Ведение базы данных реального времени с технологической информацией.
- Аварийная сигнализация и управление тревожными сообщениями.
- Подготовка и генерирование отчетов о ходе технологического процесса.
- Осуществление сетевого взаимодействия между SCADA ПК.
- Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
SCADA-системы позволяют разрабатывать АСУ ТП в клиент-серверной или в распределённой архитектуре.
Основные компоненты SCADA
SCADA—система обычно содержит следующие подсистемы:- Драйверы или серверы ввода-вывода — программы, обеспечивающие связь SCADA с промышленными контроллерами, счётчиками, АЦП и другими устройствами ввода-вывода информации.
- Система реального времени — программа, обеспечивающая обработку данных в пределах заданного временного цикла с учетом приоритетов.
- Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) — инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им. Программа-редактор для разработки человеко-машинного интерфейса.
- Система логического управления — программа, обеспечивающая исполнение пользовательских программ (скриптов) логического управления в SCADA-системе. Набор редакторов для их разработки.
- База данных реального времени — программа, обеспечивающая сохранение истории процесса в режиме реального времени.
- Система управления тревогами — программа, обеспечивающая автоматический контроль технологических событий, отнесение их к категории нормальных, предупреждающих или аварийных, а также обработку событий оператором или компьютером.
- Генератор отчетов — программа, обеспечивающая создание пользовательских отчетов о технологических событиях. Набор редакторов для их разработки.
- Внешние интерфейсы — стандартные интерфейсы обмена данными между SCADA и другими приложениями. Обычно OPC, DDE, ODBC, DLL и т. д.
Концепции систем
Термин SCADA обычно относится к централизованным системам контроля и управления всей системой, или комплексами систем, осуществляемого с участием человека. Большинство управляющих воздействий выполняется автоматически RTU или ПЛК. Непосредственное управление процессом обычно обеспечивается RTU или PLC, а SCADA управляет режимами работы. Например, PLC может управлять потоком охлаждающей воды внутри части производственного процесса, а SCADA система может позволить операторам изменять уста для потока, менять маршруты движения жидкости, заполнять те или иные ёмкости, а также следить за тревожными сообщениями (алармами), такими как — потеря потока и высокая температура, которые должны быть отображены, записаны, и на которые оператор должен своевременно реагировать. Цикл управления с обратной связью проходит через RTU или ПЛК, в то время как SCADA система контролирует полное выполнение цикла.
Сбор данных начинается в RTU или на уровне PLC и включает — показания измерительного прибора. Далее данные собираются и форматируются таким способом, чтобы оператор диспетчерской, используя HMI мог принять контролирующие решения — корректировать или прервать стандартное управление средствами RTU/ПЛК. Данные могут также быть записаны в архив для построения трендов и другой аналитической обработки накопленных данных.[ http://ru.wikipedia.org/wiki/SCADA]
CitectSCADA
полнофункциональная система мониторинга, управления и сбора данных (SCADA – Supervisory Control And Data Acquisition)
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ:CitectSCADA построена на базе мультизадачного ядра реального времени, что обеспечивает производительность сбора до 5 000 значений в секунду при работе в сетевом режиме с несколькими станциями. Модульная клиент-серверная архитектура позволяет одинаково эффективно применять CitectSCADA как в малых проектах, с использованием только одного АРМ, так и в больших, с распределением задач на несколько компьютеров.
В отличие от других SCADA-систем среда разработки CitectSCADA поставляется бесплатно. Оплачивается только среда исполнения (runtime). Это позволяет пользователю разработать и протестировать пробный проект, не вкладывая средств на начальном этапе.
Схема лицензирования CitectSCADA основана на учете числа одновременно задействованных компьютеров в проекте, а не общего числа компьютеров, на которых установлена CitectSCADA.
CitectSCADA лицензируется на заданное количество точек (дискретных или аналоговых переменных). При этом учитываются только внешние переменные, считываемые из устройств ввода/вывода, а внутренние переменные, находящиеся в памяти или на диске, бесплатны и не входят в количество лицензируемых точек. Градация количества лицензируемых точек в CitectSCADA более равномерна, чем в других системах: 75, 150, 500, 1 500, 5 000, 15 000, 50 000 и неограниченное количество.
В CitectSCADA резервирование является встроенным и легко конфигурируемым. Резервирование позволяет защищать все зоны потенциальных отказов как функциональных модулей (серверов и клиентов), так и сетевых соединений между узлами и устройствами ввода/вывода.
CitectSCADA имеет встроенный язык программирования CiCode, а также поддержку VBA.
CitectSCADA работает как 32-разрядное приложение Windows 9X/NT/2000/XP/2003. Сбор данных, формирование алармов и построение трендов происходит одновременно с редактированием и компиляцией.
[ http://www.rtsoft.ru/catalog/soft/scada/detail/343/]
Словесный портрет современной управляющей системы типа SCADA
-
Масштабируемая
- Наращивание системы без её переконфигурирования
- Масштабы проекта не ограничены
- До 255 одновременно подключённых клиентов
- Поддержка локальных и глобальных сетей
- Возможность интеграции с веб-приложениями без конфигурирования системы
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка кластерных конфигураций
- Возможность перезапуска отдельных процессов, относящихся к разным компонентам
-
Гибкая
- Полноценная архитектура «клиент-сервер»
- Возможность масштабирования серверов/серверных массивов алармов, трендов и отчётов
- Поддержка централизованного хранения файлов проекта для удобства обслуживания, а также распределённого хранения и комбинированного варианта
- Внесение изменений на отдельных локациях
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка устоявшихся и новых стандартов
-
Надёжная
- Встроенная поддержка режима ожидания
- Резервирование файловых серверов
- Резервирование сетевых коммуникаций
- Резервирование серверов алармов
- Резервирование серверов трендов
- Резервирование серверов отчётов
- Многоуровневое резервирование ввода-вывода
- Автоматическая замена серверов
- Автоматическая синхронизация историй трендов
- Автоматическая синхронизация таблиц алармов
- Автоматическая синхронизация времени
- Защитные функции
- Автоматический перезапуск в случае сбоя системы
- Высокопроизводительная
- Безопасная
-
Коммуникационные технологии
- Поддержка открытых коммуникационных стандартов
- Поддержка каждым сервером ввода-вывода многих протоколов
- Драйверы протоколов RS-232, RS-422, RS-485, TCP/IP
- Время установки драйверов в пределах 60 секунд
- До 255 одновременно подключённых клиентов
- До 4096 устройств ввода-вывода на одну систему
- Поддержка внешнего подключения для удалённых устройств
- Средства разработки драйверов для специализированных протоколов
- Поддержка стандарта OPC Server DA2.0
- Интегрированный веб-сервис XML
- Доступ
- Неограниченное число меток
- Длина имени метки до 80 символов
- Поддержка меток качества и времени для соответствующих драйверов
- Единая база данных для контроллеров ПЛК и системы SCADA
- Двунаправленная синхронизация со средой разработки для ПЛК
- Статическая синхронизация для разработки в автономном режиме
- - Автоматические импорт и синхронизация
- Импорт из ПЛК разных типов
- Добавление пользовательских схем импорта
-
Разработка
- Неограниченное число экранов
- 24-битные цвета
- Быстрый выбор цветов по названиям
- Поддержка прозрачных цветов
- Продвинутая анимация без дополнительного программирования
- Анимация символов на базе тегов
- До 32000 анимированных изображений на страницу
- Неограниченное число мигающих цветов
- Мультиязычность
- Инструменты типа 3D Pipe
- Трёхмерные эффекты (поднятие, опускание, выдавливание)
-
Импорт графики
- Растровые изображения Windows (BMP, RLE, DIB)
- Формат AutoCAD (DXF)
- Формат Encapsulated Postscript (EPS)
- Формат Fax Image (FAX)
- Формат Ventura (IMG)
- Формат JPEG (JPG, JIF, JFF, JFE)
- Формат Photo CD (PCD)
- Формат PaintBrush (PCX)
- Формат Portable Network Graphics (PNG)
- Формат Targa (TGA)
- Формат Tagged Image Format (TIFF)
- Формат Windows Meta File (WMF)
- Формат Word Perfect Graphics (WPG)
- Неограниченное число отмен действий
- Кнопки в стиле Windows XP со свойствами динамического перемещения
- Шаблоны
- Символы
- Более 800 символов в комплекте поставки
-
Объектное конфигурирование
- Неограниченное число объектов типа «джинн» (Genie) и «суперджинн» (Super Genie)
- Пользовательские «джинны» позволяют отображать на экране пользовательское оборудование
- Пользовательские «суперджины» позволяют работать с разными устройствами через один интерфейс
- Объекты типа «джинн» и «суперджинн» способны воспринимать изменения в тегах устройств без дополнительного программирования
-
Работа
- Разрешения до 4096 x 4096
- Изменение размеров изображений (изотропное и анизотропное)
- Поддержка вывода на несколько мониторов
- Настройка скорости обновления страниц (минимум 10 мс)
- Информирование о потере связи
- Переключение языков в ходе работы
- Поддержка одно- и двухбайтовых наборов символов
-
Безопасность
- Уровень безопасности влияет на:
- Видимость объектов
- Доступ к графическим дисплеям
- Подтверждение алармов
- Создание отчётов
- Системные утилиты
-
Управление
- Сенсорные команды
- Мышь
- -Клавиатурное управление системой, страницами и анимацией
- Вертикальные и горизонтальные ползунки
- Замена БД
-
Анализ процессов
- Объединение алармов с трендами
- 32 и более перьев
- 4 и более оконных секций
- 2 и более курсоров
- Наложение перьев
- Информация о качестве данных
- Аналоговые и цифровые перья
- Информация о подтверждении алармов
- Описание алармов (аналоговых и мультицифровых)
- Комментарии к алармам
- Поддержка перехода на летнее и зимнее время
- Сохранение просмотров в процессе работы
- Хранение просмотров в удалённых локациях
- Отображение различных временных периодов на том же дисплее
- Настраиваемое и расширяемое управление
-
Алармы
- Неограниченное число алармов
- Централизованная обработка алармов
- Алармы могут быть следующих типов:
- Цифровые
- Аналоговые
- Временные метки
- Высокоуровневые выражения
- Мультицифровые
- Цифровые с временными метками
- Аналоговые с временными метками
- Изменение языка для всех алармов в процессе работы
- Подтверждение приёма в сети без дополнительного конфигурирования
- Отключение сети без дополнительного конфигурирования
- Категории, зоны и приоритеты алармов
- Задержки алармов
- Назначение временных меток с разрешением в 1 мс
- Различные данные в алармах
- Индивидуальные и групповые подтверждения
- Подтверждения на основе категорий и приоритетов
- Подтверждения отображаются графически, в списке алармов или через специализированный код:
- Сортировка алармов
- Фильтрация алармов
- Пользовательские поля алармов
-
Тренды
- Неограниченное число трендов
- До 16000 трендов на страницу
- Отображение любого тренда из истории менее чем за 1 секунду
- Файлов трендов регулируемых размеров
- Просмотр архивных трендов параллельно с актуальными в процессе работы системы
- Выбор с разрешением 1 мс
- Сравнение трендов
- Быстрый выбор трендов по тегам
- Сохранение по событию или периодическое сохранение
Статистический контроль ( SPC)
- Таблицы индексов Cp и CpK
- Контрольные карты X, R и S
- Диаграммы Парето
- Настраиваемые размеры и границы подгрупп
- Типы алармов: Above UCL, Below LCL, Outside CL, Down Trend, Up Trend, Erratic, Gradual, Down, Gradual Up, Mixture, Outside WL, Freak, Stratification и высокоуровневые выражения
- Редактор сгенерированных отчётов, редактирование по модели WYSIWYN, отчёты в формате Rich Text
- Запуск внешними событиями, по расписанию, через высокоуровневые выражения и по команде оператора
- Вывод на принтер, в файл, по электронной почте, на экран, в формат HTML
- Разработка проекта
- Масштабы проекта не ограничены
- Возможность разбиения на несколько проектов
- Удобная стандартизация проектов
- Удобное обслуживание проектов
- Встроенное средство настройки компьютеров позволяет конфигурировать каждый подключённый к сети ПК по отдельности
- Истинная вытесняющая многозадачность
- До 512 параллельных потоков
- Доступно более 600 функций SCADA
- Библиотеки для пользовательских функций
- До 2700 пользовательских функций
- Локальные, модульные и глобальные переменные
- Дополнительное программное обеспечение для создания собственных функций не требуется
- Прямой доступ к данным трендов, отчётов и алармов
- Подсвечивание синтаксиса
- Система онлайн-подсказок
- Всплывающие подсказки
- При редактировании доступны:
- Контрольные точки
- Просмотр переменных
- Мониторинг нитей
- Выделение кода цветом
- Окно контрольных точек
- Пошаговый режим выполнения
- Выделение текущей строки
- Удалённая отладка
- Автоматическая отладка в случае ошибок
- Сервер и клиент OPC
- Интерфейс ODBC
- Интерфейс OLE-DB
- Интерфейс CTAPI
- Интерфейс DLL
- Интерфейс MAPI (MAIL)
- Протоколы TCP/IP
- Последовательный интерфейс
[ http://www.rtsoft-training.ru/?p=600074]
Тематики
Синонимы
- SCADA-система
- диспетчерское управление и сбор данных
- система диспетчерского управления и сбора данных
- система мониторинга, управления и сбора данных
EN
Англо-русский словарь нормативно-технической терминологии > SCADA system
-
12 Supervisory for Control And Data Acquision
SCADA
SCADA-система
диспетчерское управление и сбор данных
ПО, предназначенное для поддержки средств автоматизации и построения систем промышленной автоматизации.
[ http://www.morepc.ru/dict/]SCADA (аббр. от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) — программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления. SCADA может являться частью АСУ ТП, АСКУЭ, системы экологического мониторинга, научного эксперимента, автоматизации здания и т. д. SCADA-системы используются во всех отраслях хозяйства, где требуется обеспечивать операторский контроль за технологическими процессами в реальном времени. Данное программное обеспечение устанавливается на компьютеры и, для связи с объектом, использует драйверы ввода-вывода или OPC/DDE серверы. Программный код может быть как написан на языке программирования (например на C++), так и сгенерирован в среде проектирования.
Иногда SCADA-системы комплектуются дополнительным ПО для программирования промышленных контроллеров. Такие SCADA-системы называются интегрированными и к ним добавляют термин SoftLogic.
Термин «SCADA» имеет двоякое толкование. Наиболее широко распространено понимание SCADA как приложения[2], то есть программного комплекса, обеспечивающего выполнение указанных функций, а также инструментальных средств для разработки этого программного обеспечения. Однако, часто под SCADA-системой подразумевают программно-аппаратный комплекс. Подобное понимание термина SCADA более характерно для раздела телеметрия.
Значение термина SCADA претерпело изменения вместе с развитием технологий автоматизации и управления технологическими процессами. В 80-е годы под SCADA-системами чаще понимали программно-аппаратные комплексы сбора данных реального времени. С 90-х годов термин SCADA больше используется для обозначения только программной части человеко-машинного интерфейса АСУ ТП.Основные задачи, решаемые SCADA-системами
SCADA-системы решают следующие задачи:- Обмен данными с «устройствами связи с объектом», то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
- Обработка информации в реальном времени.
- Логическое управление.
- Отображение информации на экране монитора в удобной и понятной для человека форме.
- Ведение базы данных реального времени с технологической информацией.
- Аварийная сигнализация и управление тревожными сообщениями.
- Подготовка и генерирование отчетов о ходе технологического процесса.
- Осуществление сетевого взаимодействия между SCADA ПК.
- Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
SCADA-системы позволяют разрабатывать АСУ ТП в клиент-серверной или в распределённой архитектуре.
Основные компоненты SCADA
SCADA—система обычно содержит следующие подсистемы:- Драйверы или серверы ввода-вывода — программы, обеспечивающие связь SCADA с промышленными контроллерами, счётчиками, АЦП и другими устройствами ввода-вывода информации.
- Система реального времени — программа, обеспечивающая обработку данных в пределах заданного временного цикла с учетом приоритетов.
- Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) — инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им. Программа-редактор для разработки человеко-машинного интерфейса.
- Система логического управления — программа, обеспечивающая исполнение пользовательских программ (скриптов) логического управления в SCADA-системе. Набор редакторов для их разработки.
- База данных реального времени — программа, обеспечивающая сохранение истории процесса в режиме реального времени.
- Система управления тревогами — программа, обеспечивающая автоматический контроль технологических событий, отнесение их к категории нормальных, предупреждающих или аварийных, а также обработку событий оператором или компьютером.
- Генератор отчетов — программа, обеспечивающая создание пользовательских отчетов о технологических событиях. Набор редакторов для их разработки.
- Внешние интерфейсы — стандартные интерфейсы обмена данными между SCADA и другими приложениями. Обычно OPC, DDE, ODBC, DLL и т. д.
Концепции систем
Термин SCADA обычно относится к централизованным системам контроля и управления всей системой, или комплексами систем, осуществляемого с участием человека. Большинство управляющих воздействий выполняется автоматически RTU или ПЛК. Непосредственное управление процессом обычно обеспечивается RTU или PLC, а SCADA управляет режимами работы. Например, PLC может управлять потоком охлаждающей воды внутри части производственного процесса, а SCADA система может позволить операторам изменять уста для потока, менять маршруты движения жидкости, заполнять те или иные ёмкости, а также следить за тревожными сообщениями (алармами), такими как — потеря потока и высокая температура, которые должны быть отображены, записаны, и на которые оператор должен своевременно реагировать. Цикл управления с обратной связью проходит через RTU или ПЛК, в то время как SCADA система контролирует полное выполнение цикла.
Сбор данных начинается в RTU или на уровне PLC и включает — показания измерительного прибора. Далее данные собираются и форматируются таким способом, чтобы оператор диспетчерской, используя HMI мог принять контролирующие решения — корректировать или прервать стандартное управление средствами RTU/ПЛК. Данные могут также быть записаны в архив для построения трендов и другой аналитической обработки накопленных данных.[ http://ru.wikipedia.org/wiki/SCADA]
CitectSCADA
полнофункциональная система мониторинга, управления и сбора данных (SCADA – Supervisory Control And Data Acquisition)
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ:CitectSCADA построена на базе мультизадачного ядра реального времени, что обеспечивает производительность сбора до 5 000 значений в секунду при работе в сетевом режиме с несколькими станциями. Модульная клиент-серверная архитектура позволяет одинаково эффективно применять CitectSCADA как в малых проектах, с использованием только одного АРМ, так и в больших, с распределением задач на несколько компьютеров.
В отличие от других SCADA-систем среда разработки CitectSCADA поставляется бесплатно. Оплачивается только среда исполнения (runtime). Это позволяет пользователю разработать и протестировать пробный проект, не вкладывая средств на начальном этапе.
Схема лицензирования CitectSCADA основана на учете числа одновременно задействованных компьютеров в проекте, а не общего числа компьютеров, на которых установлена CitectSCADA.
CitectSCADA лицензируется на заданное количество точек (дискретных или аналоговых переменных). При этом учитываются только внешние переменные, считываемые из устройств ввода/вывода, а внутренние переменные, находящиеся в памяти или на диске, бесплатны и не входят в количество лицензируемых точек. Градация количества лицензируемых точек в CitectSCADA более равномерна, чем в других системах: 75, 150, 500, 1 500, 5 000, 15 000, 50 000 и неограниченное количество.
В CitectSCADA резервирование является встроенным и легко конфигурируемым. Резервирование позволяет защищать все зоны потенциальных отказов как функциональных модулей (серверов и клиентов), так и сетевых соединений между узлами и устройствами ввода/вывода.
CitectSCADA имеет встроенный язык программирования CiCode, а также поддержку VBA.
CitectSCADA работает как 32-разрядное приложение Windows 9X/NT/2000/XP/2003. Сбор данных, формирование алармов и построение трендов происходит одновременно с редактированием и компиляцией.
[ http://www.rtsoft.ru/catalog/soft/scada/detail/343/]
Словесный портрет современной управляющей системы типа SCADA
-
Масштабируемая
- Наращивание системы без её переконфигурирования
- Масштабы проекта не ограничены
- До 255 одновременно подключённых клиентов
- Поддержка локальных и глобальных сетей
- Возможность интеграции с веб-приложениями без конфигурирования системы
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка кластерных конфигураций
- Возможность перезапуска отдельных процессов, относящихся к разным компонентам
-
Гибкая
- Полноценная архитектура «клиент-сервер»
- Возможность масштабирования серверов/серверных массивов алармов, трендов и отчётов
- Поддержка централизованного хранения файлов проекта для удобства обслуживания, а также распределённого хранения и комбинированного варианта
- Внесение изменений на отдельных локациях
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка устоявшихся и новых стандартов
-
Надёжная
- Встроенная поддержка режима ожидания
- Резервирование файловых серверов
- Резервирование сетевых коммуникаций
- Резервирование серверов алармов
- Резервирование серверов трендов
- Резервирование серверов отчётов
- Многоуровневое резервирование ввода-вывода
- Автоматическая замена серверов
- Автоматическая синхронизация историй трендов
- Автоматическая синхронизация таблиц алармов
- Автоматическая синхронизация времени
- Защитные функции
- Автоматический перезапуск в случае сбоя системы
- Высокопроизводительная
- Безопасная
-
Коммуникационные технологии
- Поддержка открытых коммуникационных стандартов
- Поддержка каждым сервером ввода-вывода многих протоколов
- Драйверы протоколов RS-232, RS-422, RS-485, TCP/IP
- Время установки драйверов в пределах 60 секунд
- До 255 одновременно подключённых клиентов
- До 4096 устройств ввода-вывода на одну систему
- Поддержка внешнего подключения для удалённых устройств
- Средства разработки драйверов для специализированных протоколов
- Поддержка стандарта OPC Server DA2.0
- Интегрированный веб-сервис XML
- Доступ
- Неограниченное число меток
- Длина имени метки до 80 символов
- Поддержка меток качества и времени для соответствующих драйверов
- Единая база данных для контроллеров ПЛК и системы SCADA
- Двунаправленная синхронизация со средой разработки для ПЛК
- Статическая синхронизация для разработки в автономном режиме
- - Автоматические импорт и синхронизация
- Импорт из ПЛК разных типов
- Добавление пользовательских схем импорта
-
Разработка
- Неограниченное число экранов
- 24-битные цвета
- Быстрый выбор цветов по названиям
- Поддержка прозрачных цветов
- Продвинутая анимация без дополнительного программирования
- Анимация символов на базе тегов
- До 32000 анимированных изображений на страницу
- Неограниченное число мигающих цветов
- Мультиязычность
- Инструменты типа 3D Pipe
- Трёхмерные эффекты (поднятие, опускание, выдавливание)
-
Импорт графики
- Растровые изображения Windows (BMP, RLE, DIB)
- Формат AutoCAD (DXF)
- Формат Encapsulated Postscript (EPS)
- Формат Fax Image (FAX)
- Формат Ventura (IMG)
- Формат JPEG (JPG, JIF, JFF, JFE)
- Формат Photo CD (PCD)
- Формат PaintBrush (PCX)
- Формат Portable Network Graphics (PNG)
- Формат Targa (TGA)
- Формат Tagged Image Format (TIFF)
- Формат Windows Meta File (WMF)
- Формат Word Perfect Graphics (WPG)
- Неограниченное число отмен действий
- Кнопки в стиле Windows XP со свойствами динамического перемещения
- Шаблоны
- Символы
- Более 800 символов в комплекте поставки
-
Объектное конфигурирование
- Неограниченное число объектов типа «джинн» (Genie) и «суперджинн» (Super Genie)
- Пользовательские «джинны» позволяют отображать на экране пользовательское оборудование
- Пользовательские «суперджины» позволяют работать с разными устройствами через один интерфейс
- Объекты типа «джинн» и «суперджинн» способны воспринимать изменения в тегах устройств без дополнительного программирования
-
Работа
- Разрешения до 4096 x 4096
- Изменение размеров изображений (изотропное и анизотропное)
- Поддержка вывода на несколько мониторов
- Настройка скорости обновления страниц (минимум 10 мс)
- Информирование о потере связи
- Переключение языков в ходе работы
- Поддержка одно- и двухбайтовых наборов символов
-
Безопасность
- Уровень безопасности влияет на:
- Видимость объектов
- Доступ к графическим дисплеям
- Подтверждение алармов
- Создание отчётов
- Системные утилиты
-
Управление
- Сенсорные команды
- Мышь
- -Клавиатурное управление системой, страницами и анимацией
- Вертикальные и горизонтальные ползунки
- Замена БД
-
Анализ процессов
- Объединение алармов с трендами
- 32 и более перьев
- 4 и более оконных секций
- 2 и более курсоров
- Наложение перьев
- Информация о качестве данных
- Аналоговые и цифровые перья
- Информация о подтверждении алармов
- Описание алармов (аналоговых и мультицифровых)
- Комментарии к алармам
- Поддержка перехода на летнее и зимнее время
- Сохранение просмотров в процессе работы
- Хранение просмотров в удалённых локациях
- Отображение различных временных периодов на том же дисплее
- Настраиваемое и расширяемое управление
-
Алармы
- Неограниченное число алармов
- Централизованная обработка алармов
- Алармы могут быть следующих типов:
- Цифровые
- Аналоговые
- Временные метки
- Высокоуровневые выражения
- Мультицифровые
- Цифровые с временными метками
- Аналоговые с временными метками
- Изменение языка для всех алармов в процессе работы
- Подтверждение приёма в сети без дополнительного конфигурирования
- Отключение сети без дополнительного конфигурирования
- Категории, зоны и приоритеты алармов
- Задержки алармов
- Назначение временных меток с разрешением в 1 мс
- Различные данные в алармах
- Индивидуальные и групповые подтверждения
- Подтверждения на основе категорий и приоритетов
- Подтверждения отображаются графически, в списке алармов или через специализированный код:
- Сортировка алармов
- Фильтрация алармов
- Пользовательские поля алармов
-
Тренды
- Неограниченное число трендов
- До 16000 трендов на страницу
- Отображение любого тренда из истории менее чем за 1 секунду
- Файлов трендов регулируемых размеров
- Просмотр архивных трендов параллельно с актуальными в процессе работы системы
- Выбор с разрешением 1 мс
- Сравнение трендов
- Быстрый выбор трендов по тегам
- Сохранение по событию или периодическое сохранение
Статистический контроль ( SPC)
- Таблицы индексов Cp и CpK
- Контрольные карты X, R и S
- Диаграммы Парето
- Настраиваемые размеры и границы подгрупп
- Типы алармов: Above UCL, Below LCL, Outside CL, Down Trend, Up Trend, Erratic, Gradual, Down, Gradual Up, Mixture, Outside WL, Freak, Stratification и высокоуровневые выражения
- Редактор сгенерированных отчётов, редактирование по модели WYSIWYN, отчёты в формате Rich Text
- Запуск внешними событиями, по расписанию, через высокоуровневые выражения и по команде оператора
- Вывод на принтер, в файл, по электронной почте, на экран, в формат HTML
- Разработка проекта
- Масштабы проекта не ограничены
- Возможность разбиения на несколько проектов
- Удобная стандартизация проектов
- Удобное обслуживание проектов
- Встроенное средство настройки компьютеров позволяет конфигурировать каждый подключённый к сети ПК по отдельности
- Истинная вытесняющая многозадачность
- До 512 параллельных потоков
- Доступно более 600 функций SCADA
- Библиотеки для пользовательских функций
- До 2700 пользовательских функций
- Локальные, модульные и глобальные переменные
- Дополнительное программное обеспечение для создания собственных функций не требуется
- Прямой доступ к данным трендов, отчётов и алармов
- Подсвечивание синтаксиса
- Система онлайн-подсказок
- Всплывающие подсказки
- При редактировании доступны:
- Контрольные точки
- Просмотр переменных
- Мониторинг нитей
- Выделение кода цветом
- Окно контрольных точек
- Пошаговый режим выполнения
- Выделение текущей строки
- Удалённая отладка
- Автоматическая отладка в случае ошибок
- Сервер и клиент OPC
- Интерфейс ODBC
- Интерфейс OLE-DB
- Интерфейс CTAPI
- Интерфейс DLL
- Интерфейс MAPI (MAIL)
- Протоколы TCP/IP
- Последовательный интерфейс
[ http://www.rtsoft-training.ru/?p=600074]
Тематики
Синонимы
- SCADA-система
- диспетчерское управление и сбор данных
- система диспетчерского управления и сбора данных
- система мониторинга, управления и сбора данных
EN
Англо-русский словарь нормативно-технической терминологии > Supervisory for Control And Data Acquision
-
13 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
14 automate programmable à mémoire
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Франко-русский словарь нормативно-технической терминологии > automate programmable à mémoire
15 speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Немецко-русский словарь нормативно-технической терминологии > speicherprogrammierbare Steuerung, f
16 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
17 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
18 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
19 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
20 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
Страницы- 1
- 2
См. также в других словарях:
ТЕМПЕРАТУРА — ТЕМПЕРАТУРА, термин, принятый для обозначения теплового состояния или степени на гретости физ. тела. Из двух соприкасающихся индиферентных в хим. смысле тел одно охлаждается, если его Т. выше, другое, с более низкой Т., нагревается. На этом… … Большая медицинская энциклопедия
температура — 3.1 температура: Средняя кинетическая энергия частиц среды, обусловленная их разнонаправленным движением в среде, находящейся в состоянии термодинамического равновесия. Источник: ГОСТ Р ЕН 306 2011: Теплообменники. Измерения и точность измерений… … Словарь-справочник терминов нормативно-технической документации
условия — (см. раздел 1) d) Может ли машина представлять опасности при создании или потреблении определенных материалов? Нет Источник: ГОСТ Р МЭК 60204 1 2007: Безопасность машин. Электрооборудование машин и механизмов. Часть 1. Общие требования … Словарь-справочник терминов нормативно-технической документации
Соединённые Штаты Америки — Соединенные Штаты Америки США, гос во в Сев. Америке. Название включает: геогр. термин штаты (от англ, state государство ), так в ряде стран называют самоуправляющиеся территориальные единицы; определение соединенные, т. е. входящие в федерацию,… … Географическая энциклопедия
Жёлчный пузырь — I Жёлчный пузырь (vesica fellea) полый орган, в котором накапливается и концентрируется желчь, периодически поступающая в двенадцатиперстную кишку через пузырный и общий желчный протоки. АНАТОМИЯ И ГИСТОЛОГИЯ Желчный пузырь имеет грушевидную или… … Медицинская энциклопедия
Инсульт — I Инсульт Инсульт (позднелат. insultus приступ) острое нарушение мозгового кровообращения, вызывающее развитие стойкой (сохраняющейся более 24 ч) очаговой неврологической симптоматики. Во время И. происходят сложные метаболические и… … Медицинская энциклопедия
Китай — Китайская Народная Республика, КНР, гос во в Центр, и Вост. Азии. Принятое в России название Китай от этнонима кидане (они же китаи) группы монг. племен, покоривших в средние века территорию сев. областей совр. Китая и образовавших гос во Ляо (X… … Географическая энциклопедия
Дания — (Denmark) История Дании, физико географическое положение Дании Административное деление Дании, внешняя политика Дании, национальная кухня Дании, экономика Дании, культура Дании, Копенгаген Содержание Содержание Раздел 1. История . Раздел 2.… … Энциклопедия инвестора
Китай государство в Азии — Содержание: География. История общая. История сношений К. с Европой. Язык и литература. Китайская музыка. Великая империя восточной и центральной Азии известна среди своих обитателей под названиями, ничего общего с европейскими (Китай, China,… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Китай, государство в Азии — Содержание: География. История общая. История сношений К. с Европой. Язык и литература. Китайская музыка. Великая империя восточной и центральной Азии известна среди своих обитателей под названиями, ничего общего с европейскими (Китай, China,… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Фосфор, химический элемент — (хим.; Phosphore франц., Phosphor нем., Phosphorus англ. и лат., откуда обозначение P, иногда Ph; атомный вес 31 [В новейшее время атомный вес Ф. найден (van der Plaats) такой: 30,93 путем восстановления определенным весом Ф. металлического… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: со всех языков на все языки
со всех языков на все языки- Со всех языков на:
- Все языки
- Со всех языков на:
- Все языки
- Английский
- Немецкий
- Русский
- Французский